
经调研,目前已有的较完善的数据集有Chase[1]、SParC[2]、CoSQL[3]
其中SParC和CoSQL都是耶鲁大学与SalesForce合作的成果,Chase是西交和微软合作的成果,三个数据集中只有它是中文的
| 数据集 | 数据量 | 1轮 | 2轮 | 3轮 | 4轮 | 5轮 | 6轮 | 更多 |
|---|---|---|---|---|---|---|---|---|
| Chase | 3949 | 0 | 697 | 1858 | 1033 | 352 | 9 | 0 |
| SParC | 3034 | 8 | 793 | 1551 | 633 | 44 | 5 | 0 |
| CoSQL | 2458 | 2 | 5 | 64 | 874 | 675 | 456 | 382 |
1 | import json |
1 | import json |
浏览数据集的时候发现,chase的ground truth以两种形式同时呈现
比如,这个语句SELECT name FROM department GROUP BY departmentID ORDER BY count(departmentID) DESC LIMIT 1;就会被拆分成:
1 | "sql": { |
可以看出来以操作的关键字结构化地分割了,但是这样做的目的,以及对象中的数字、布尔值、空值的意义都不明确
而在SParC的论文[2:1]中提到了,这是受Spider[5]的启发
Following Yu et al. (2018c), we use the exact set match metric to compute the accuracy between gold and predicted SQL answers. Instead of simply employing string match, Yu et al. (2018c) decompose predicted queries into different SQL clauses such as SELECT, WHERE, GROUP BY, and ORDER BY and compute scores for each clause using set matching separately.
这么做的原因是为了提高打分的精确度,以及对不同操作进行更细粒度的评测
We report the following two metrics: question match, the exact set matching score over all questions, and interaction match, the exact set matching score over all interactions. The exact set matching score is 1 for each question only if all predicted SQL clauses are correct, and 1 for each interaction only if there is an exact set match for every question in the interaction.
spider也提供了一个转换脚本
上述Chase和SParC是已有工作中比较好的 好像也没啥别的 故采用他们提出的方法,针对项目的场景,构建自己的数据集
使用耶鲁大学课题组与论文一同发布的评测代码,并在此基础上做一些小修改以适应需求
Chase 1.0: A Large-Scale and Pragmatic Chinese Dataset for Cross-Database Context-Dependent Text-to-SQL ↩︎
SParC 1.0: Yale & Salesforce Semantic Parsing and Text-to-SQL in Context Challenge ↩︎ ↩︎
CoSQL 1.0: A Conversational Text-to-SQL Challenge Towards Cross-Domain Natural Language Interfaces to Databases ↩︎
SParc中有4个“0轮”的,即该条数据的interaction键对应的数组长度为0,但因为final中储存了问题和答案,所以实际也是1轮,只是缺少了意图等数据 ↩︎
Spider: A Large-Scale Human-Labeled Dataset for Complex and Cross-Domain Semantic Parsing and Text-to-SQL Task ↩︎
出于一些机缘巧合,暑假里加入了Vidar-Team的新生群,逐渐开始了解CTF,八月打了一段时间的hgame-mini,一度(指大佬还没来的时候)排到了第一页
虽然加入vidar基本没有可能,但也有幸认识了一些成员,这里特别要感谢Answer和eking的无私奉献对我帮助非常大,也很感谢baimeow和potato带我加入了DN11,对计网有了点更深入的了解
开学后各种事情以及开发任务逐渐增加,同时也很难找到队友,甚至于参加省赛时三个人的队伍剩下两个人一道题都没做出来,我只能选择放弃了安全这个方向。杭电的学长们一直在提的HGAME这会儿开始了,也就在寒假里抽空随便做点吧,应该是根本不存在的生涯中最后一赛了

1 | hgame{welc0m3_t0_HGAME_2024} |
到此一游
![try_another_way_to_see.png]
传到手机上从不同方向看
1 | hgame{WOW_GREAT_YOU_SEE_IT_WONDERFUL} |
前半段貌似hgame-mini同款
访问靶机,返回请从vidar.club访问这个页面
设置请求Headers
1 | Referer: vidar.club |
返回请通过Mozilla/5.0 (Vidar; VidarOS x86_64) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/121.0.0.0 Safari/537.36 Edg/121.0.0.0访问此页面,接着改Headers
1 | User-Agent: Mozilla/5.0 (Vidar; VidarOS x86_64) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/121.0.0.0 Safari/537.36 Edg/121.0.0.0 |
返回请从本地访问这个页面,设置X-Forwarded-For: 127.0.0.1,发现返回值没有变化,仔细一看返回Headers里有个Hint: Not XFF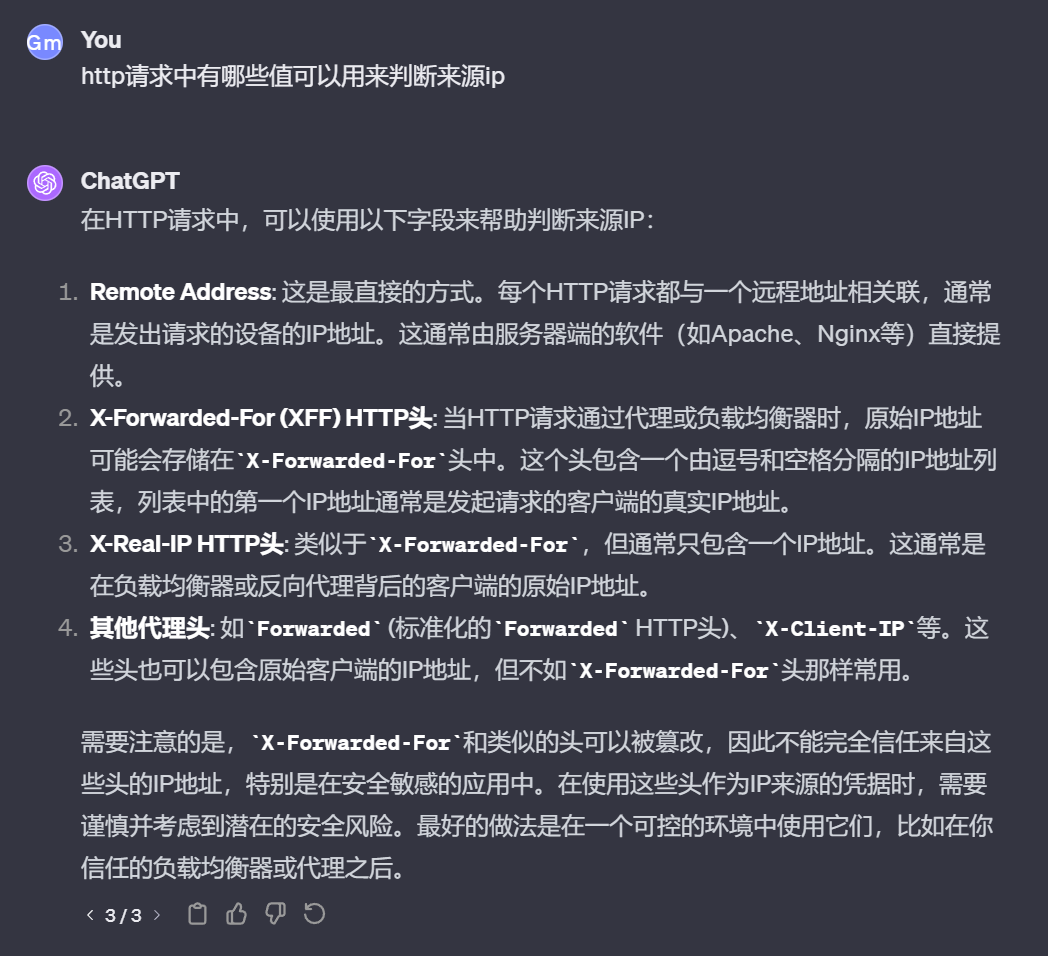
略加思索~~(指ChatGPT)~~,把XFF改成了X-Real-IP,返回值变成了Ok, the flag has been given to you ^-^
返回Headers里有Authorization: Bearer eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJGMTRnIjoiaGdhbWV7SFRUUF8hc18xbVAwclQ0bnR9In0.VKMdRQllG61JTReFhmbcfIdq7MvJDncYpjaT7zttEDc,一眼JWT的格式,base64解码之后得到flag
1 | hgame{HTTP_!s_1mP0rT4nt} |
访问靶机,弹窗提示欢迎使用用户管理系统,请先登陆,点击确定后跳转到/login.html
点击注册按钮后跳转到register_page.php,虽然会弹窗很抱歉,当前不允许注册
开始还以为题目名字的意思是SQL注入,试了好久也没成功,后来无意中发现注册页面可以看到元素
1 | <li> |
根据表单构造请求,返回数据
1 | <script language='javascript' defer> |
正常登录即可获取到flag
1 | hgame{b5619c116a434cda50308d84f381ea85124d1b2e} |
打开靶机,啊这正方教务的UI……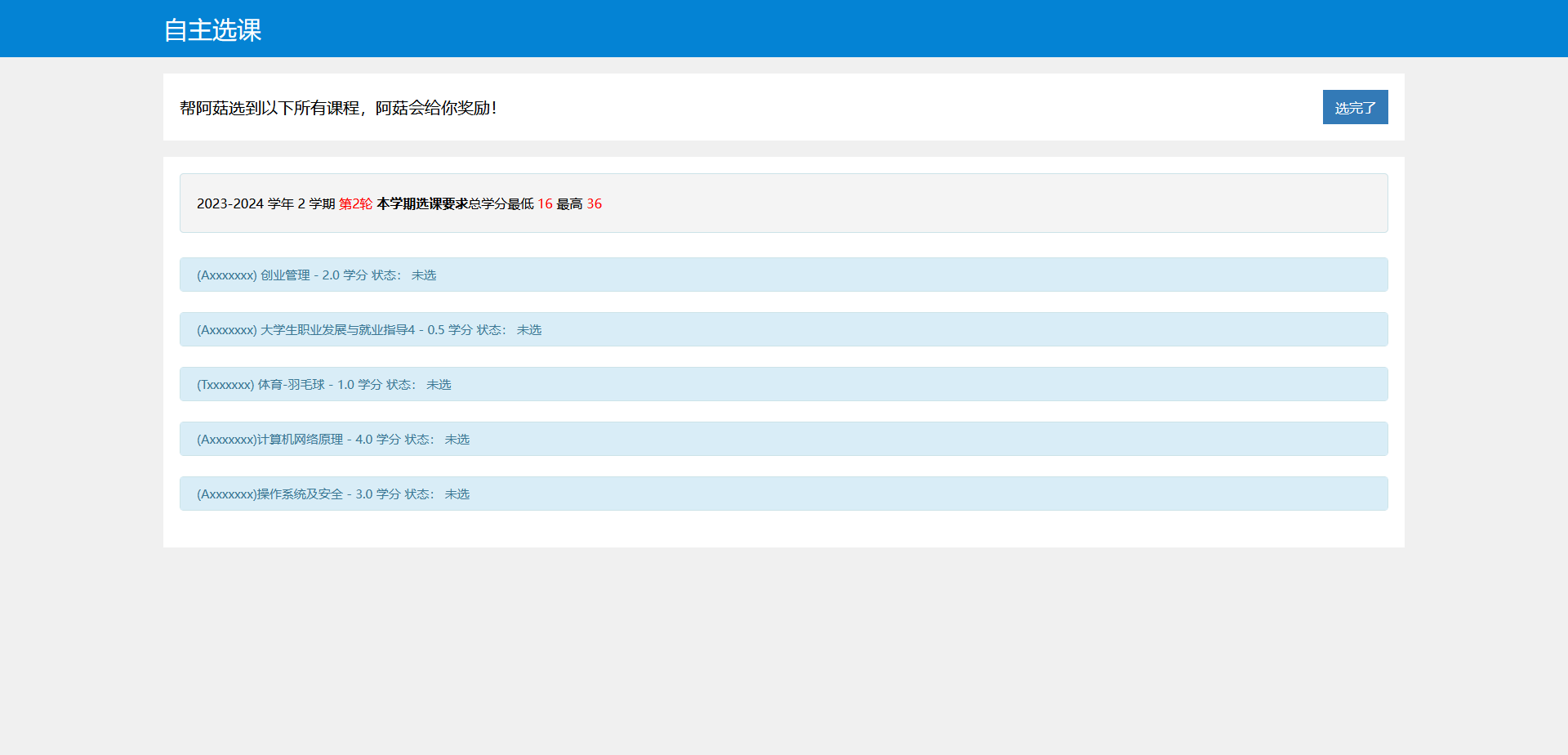
所有课都显示已满,点击有弹窗提示课程已满!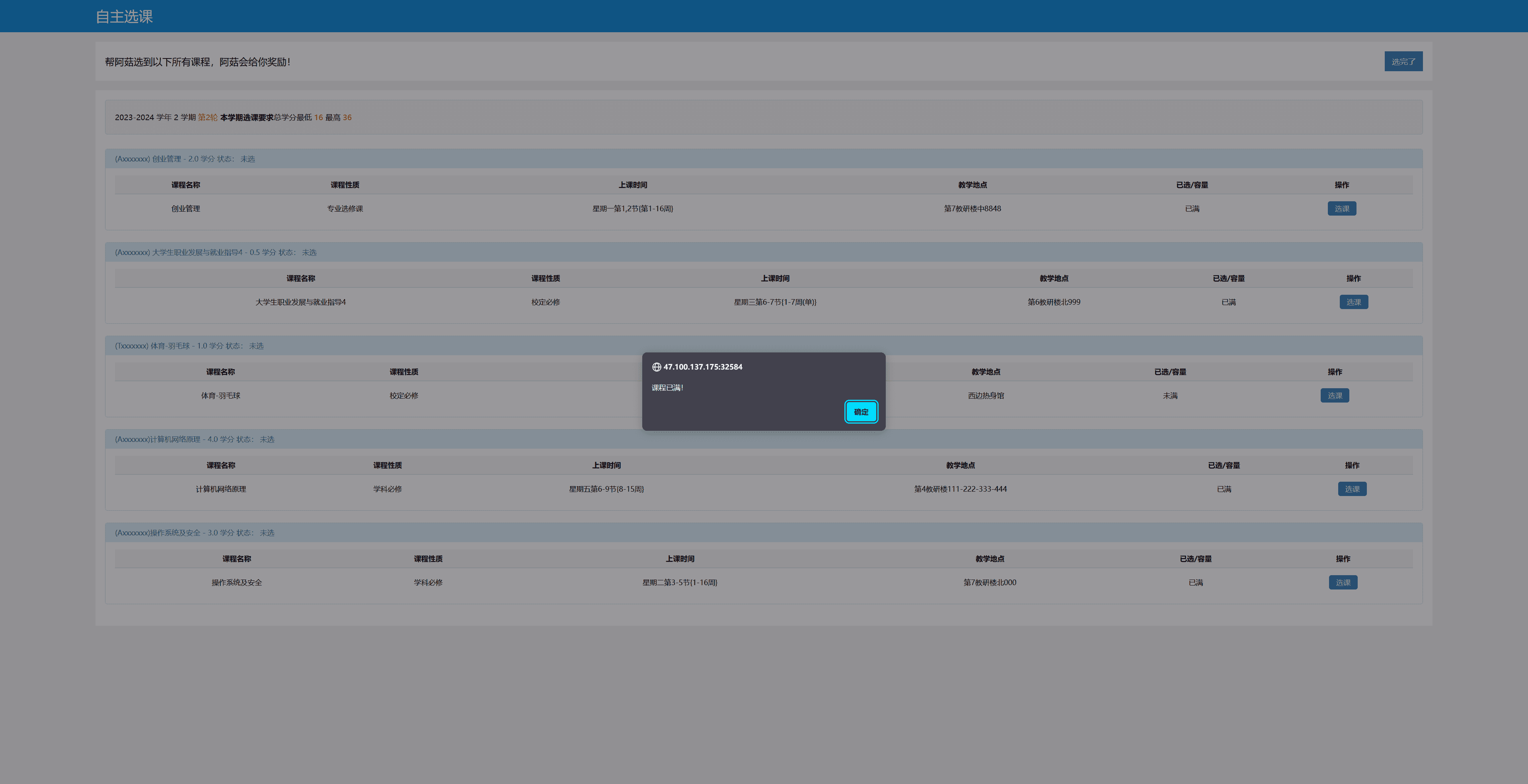
打开开发者工具,发现点击选课按钮的时候会POST请求/api/courses,payload为{"id":1},返回{"full":1,"message":"课程已满"}
点右上选完了按钮会请求/api/ok并返回{message: "呜呜呜,还没选上课呢!"}
查看源码还可以发现课程列表来自GET请求/api/courses
然后……最近项目有点多,只能腾出这半小时,没时间研究了,就这样吧(
]]>后来看wp,原来是思路完全错了,要轮询抢课
本文中的操作主要在Ubuntu23.04中完成
先从小米官网上下载固件,没什么好说的(还在用http,离谱)。
这里为了对比,下了ax3000t和ac2100的固件,这两台机器都有人在用,并且后者是已知有这个洞,而前者固件修复了这个问题但据说依然有办法。
不清楚新固件有没有修,ac2100就用了2.0.722的miwifi_r2100_firmware_4b519_2.0.722.bin
安装工具
1 | pip3 install ubi_reader |
安装后
1 | ubireader_extract_images miwifi_r2100_firmware_4b519_2.0.722.bin |
1 | UBI_File Warning: end_offset - start_offset length is not block aligned, could mean missing data.UBI_File Warning: end_offset - start_offset length is not block aligned, could mean missing data. |
有警告,不过问题不大,得到img-1537728761_vol-ubi_rootfs.ubifs
1 | unsquashfs img-1537728761_vol-ubi_rootfs.ubifs |
1 | Parallel unsquashfs: Using 6 processors |
解压出了整个文件系统
1 | ls |
1 | bin data dev etc lib mnt overlay proc readonly rom root sbin sys tmp userdisk usr var www |
代码在/usr/lib/lua/xiaoqiang里(好像代码层面小米路由器的代号是xiaoqiang?)
ax3000t的.bin文件可以解出img-1508723001_vol-kernel.ubifs和img-1508723001_vol-rootfs.ubifs两个文件,但kernel那个用unsquashfs解不开,应该只是系统内核,意义不大,rootfs那个里面就有目录结构了
这里用了一个github项目,简单翻了下代码在/src/unluac/,但是没看到maven或者gradle之类的配置文件
后来在actions配置(/.github/workflows/jarbuild.yml)里看到了构建方法,就是非常原始的一个个编译再拼起来
1 | mkdir build |
得到编译产物unluac.jar,再扫两眼代码看下用法,让ChatGPT写个脚本
1 | # 创建decompiled目录(如果不存在) |
这是Windows的,但不知道为什么(可能是他程序的问题)子目录下的识别不到
1 | @echo off |
至此,我们就获得了小米路由器的源码,虽然经过了混淆但还是有一定的意义,可以进行一些简单的字符串搜索或者扔给AI
2023.11.7更新
ljc看到称bug存在的那位说出了方法,就不再研究了
但是因为群是比较封闭的小群,也没问,所以就不把方法写出来了
本文图片可见相册
八月看到了谷歌发了篇推文,反正暑假也没什么事,就报了个名
报名表里有职位这么个选项,同时又觉得谷歌开发者大会的审核可能并不容易通过(而且这是io connect而不是往年的summit),刚好在朋友的空壳公司挂了虚职CTO,就写了个C-level高管 (不到二十岁,事CTO) ,于是半个多月之后……

说起来其实高考完这个暑假已经来了四次上海了,一次bw一次cj,还有一次是陪来上海的外地朋友,不过世博园这里倒是从世博会之后就没来过了
当时还小,对世博会已经没什么印象了,但这个中国馆总是给我种未曾谋面但非常熟悉的感觉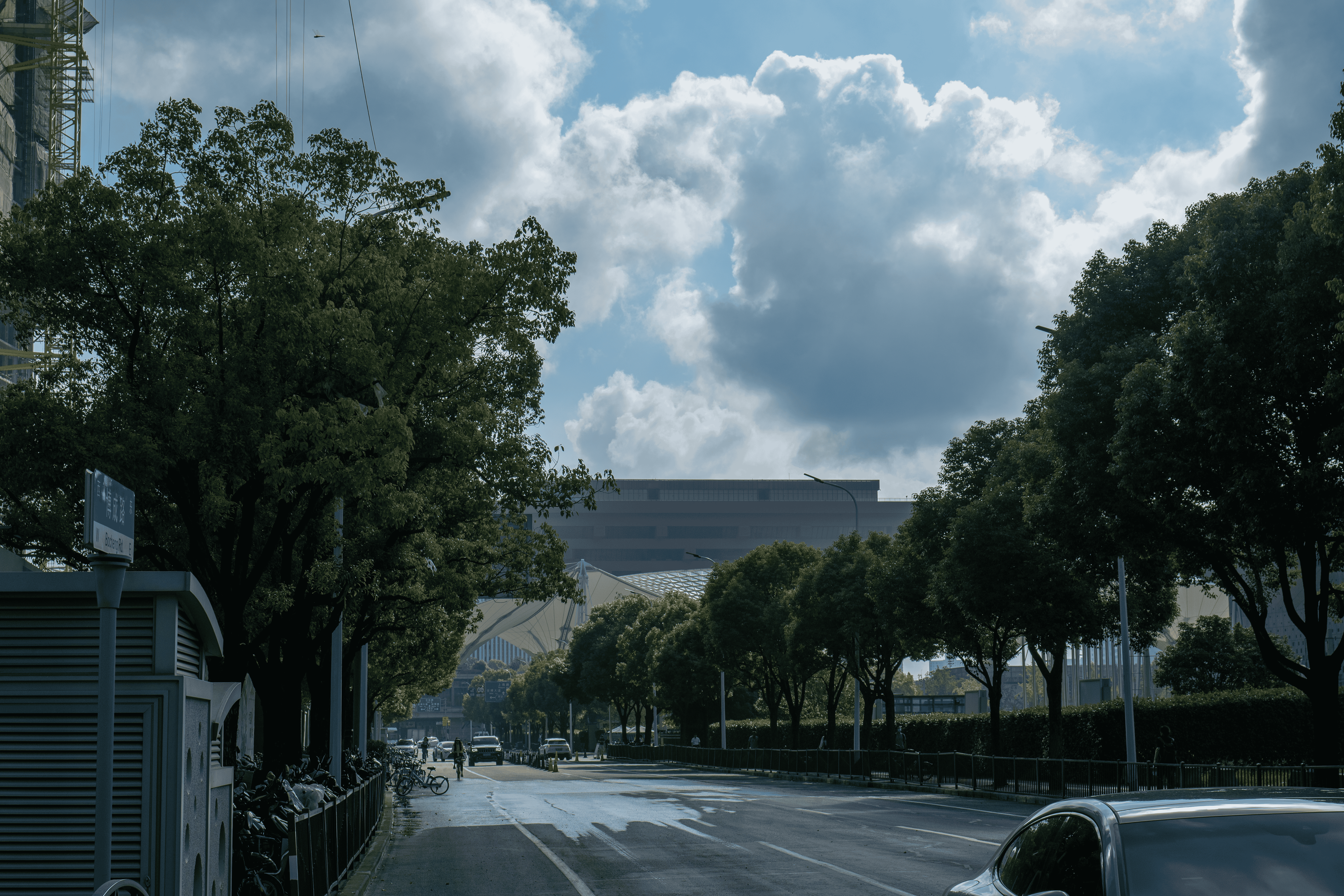
订的酒店挺便宜的,离世博园也不远,走一个红绿灯就能看到世博会中国馆了,但到世博中心还得坐一站地铁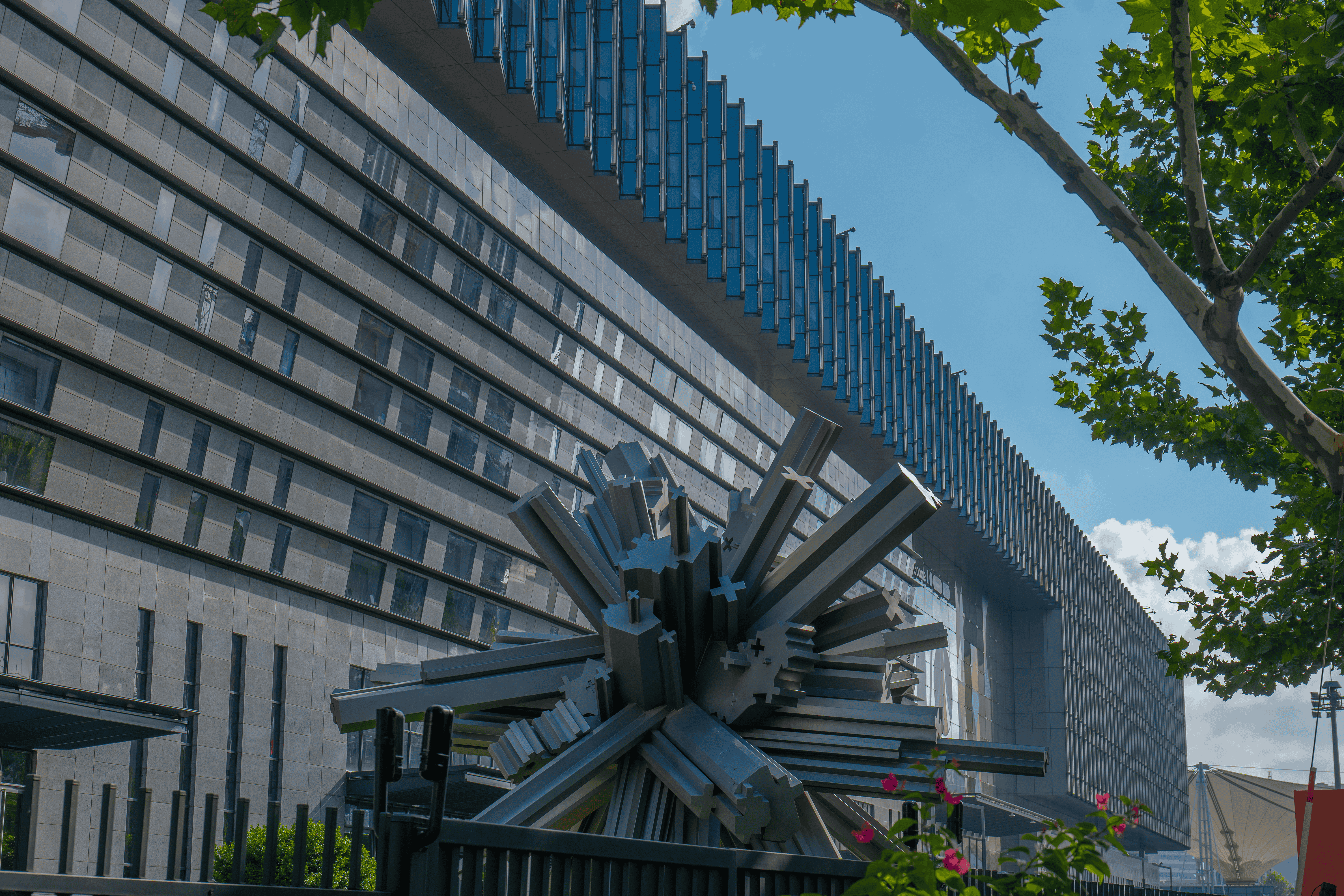
到正面再来一张
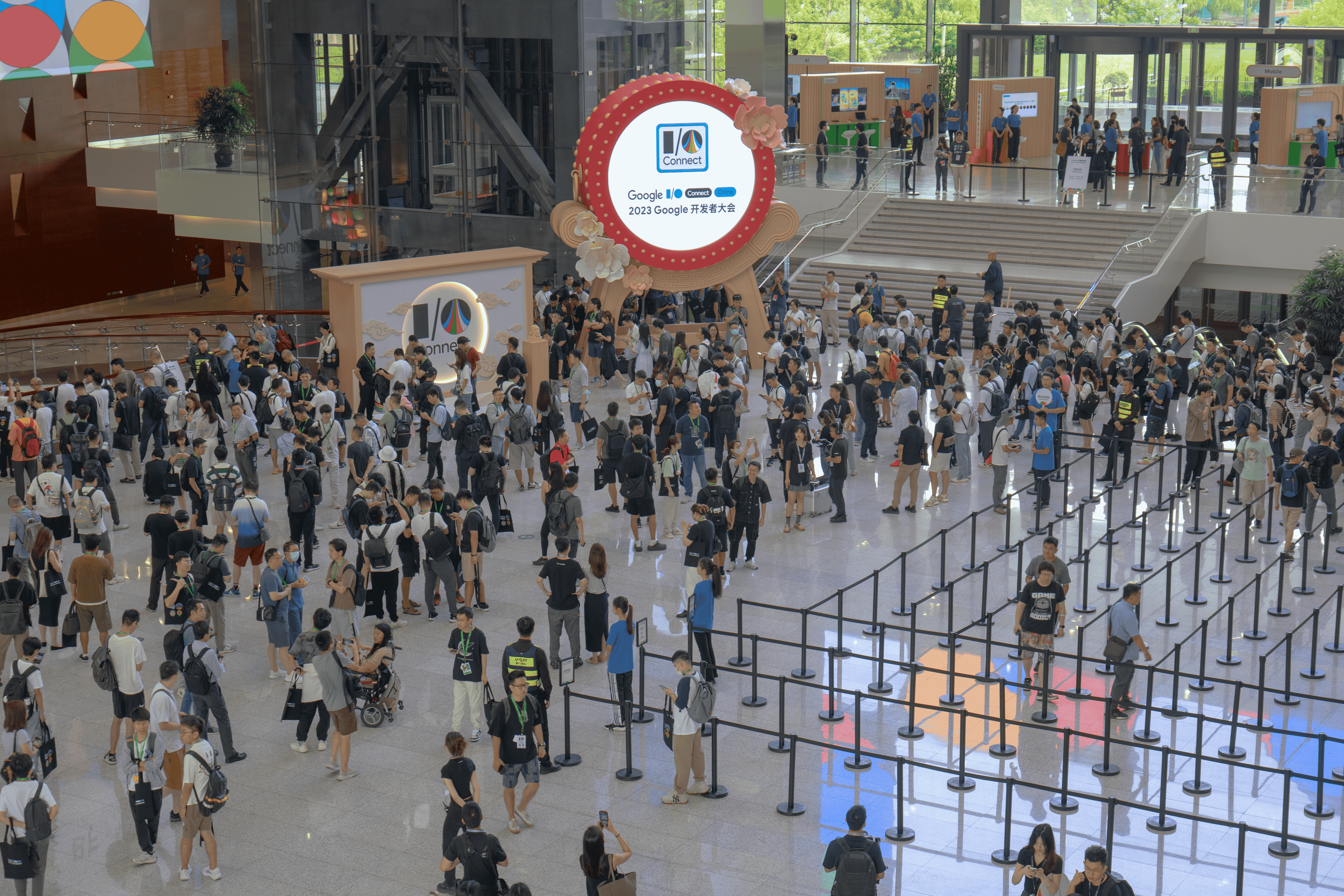
差不多准时到的,门口排队的人不多,目测一两百人(bw cj几万十几万人排队给我整出心理阴影了),人均双肩包+黑白T恤
因为人少,没多久就排完队进场了
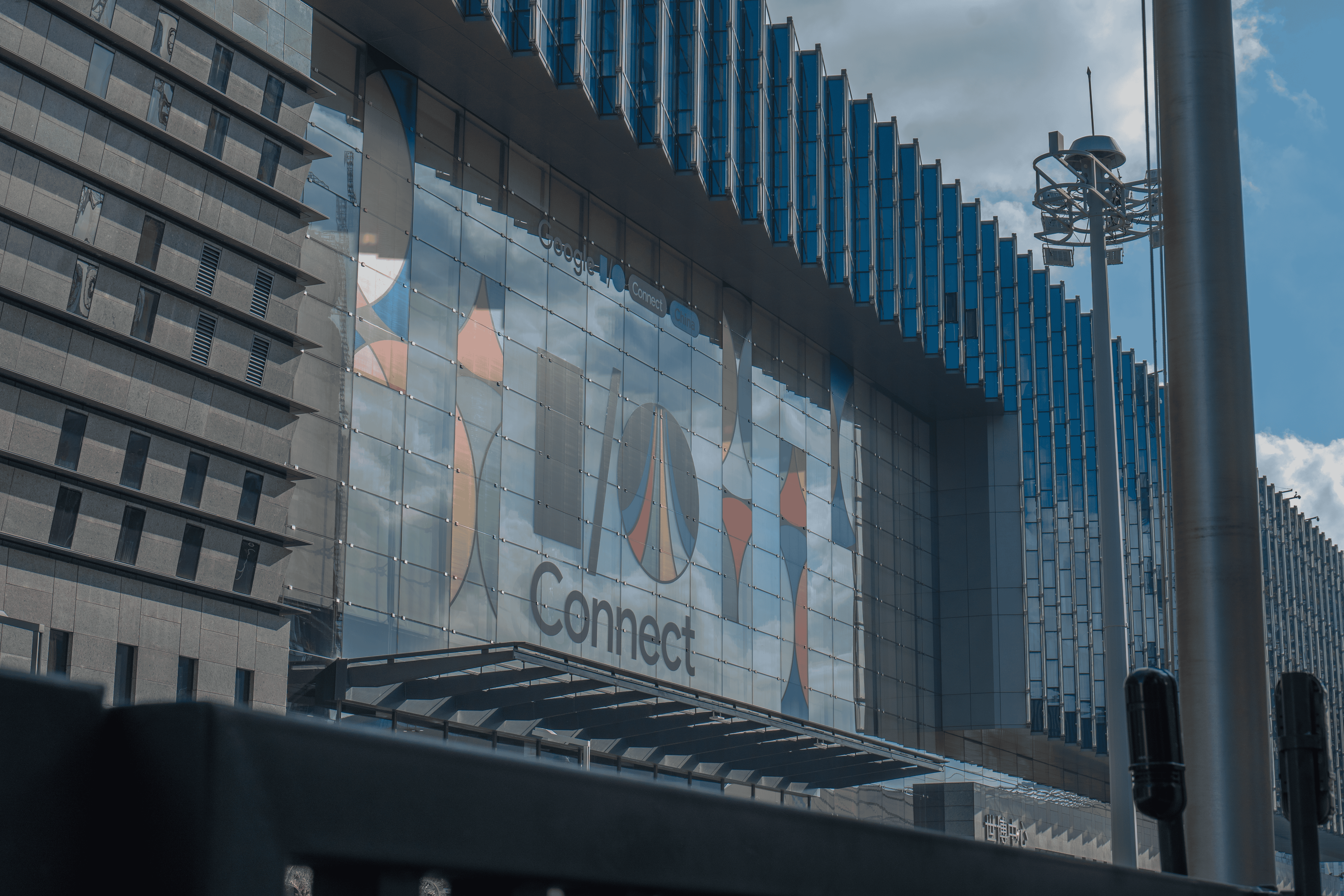
Google标和标志性的Google色
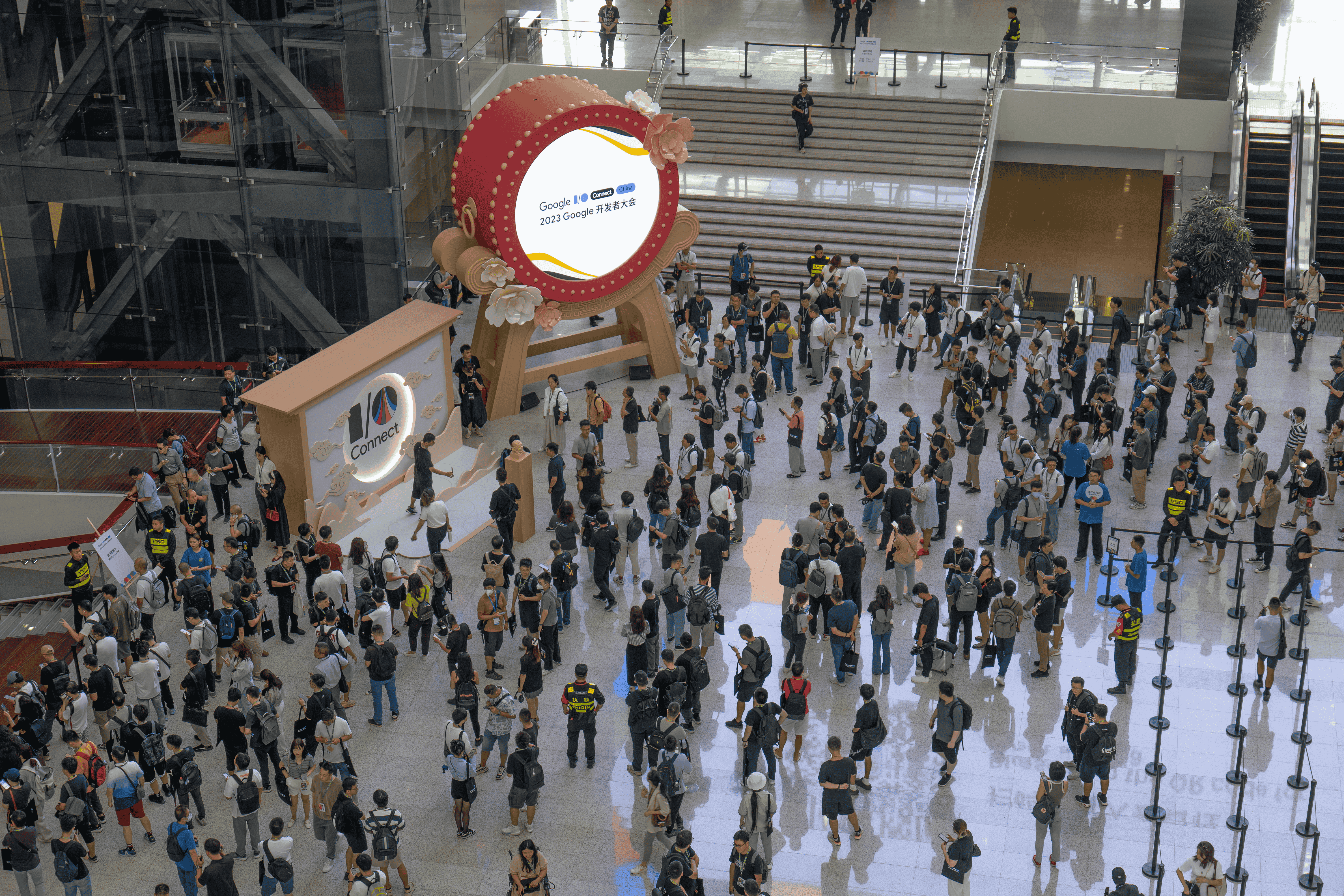
现场有一个装饰成鼓形的屏幕,挺有意思的,在旁边背景板前有机器可以拍照,拍完之后点同意就会展示在屏幕上,并且也可以用手机扫描二维码获取照片
当时排队的人贼多,后来走之前几乎没人了就拍了几张,爆照就算了(
这就是那面背景墙


签到处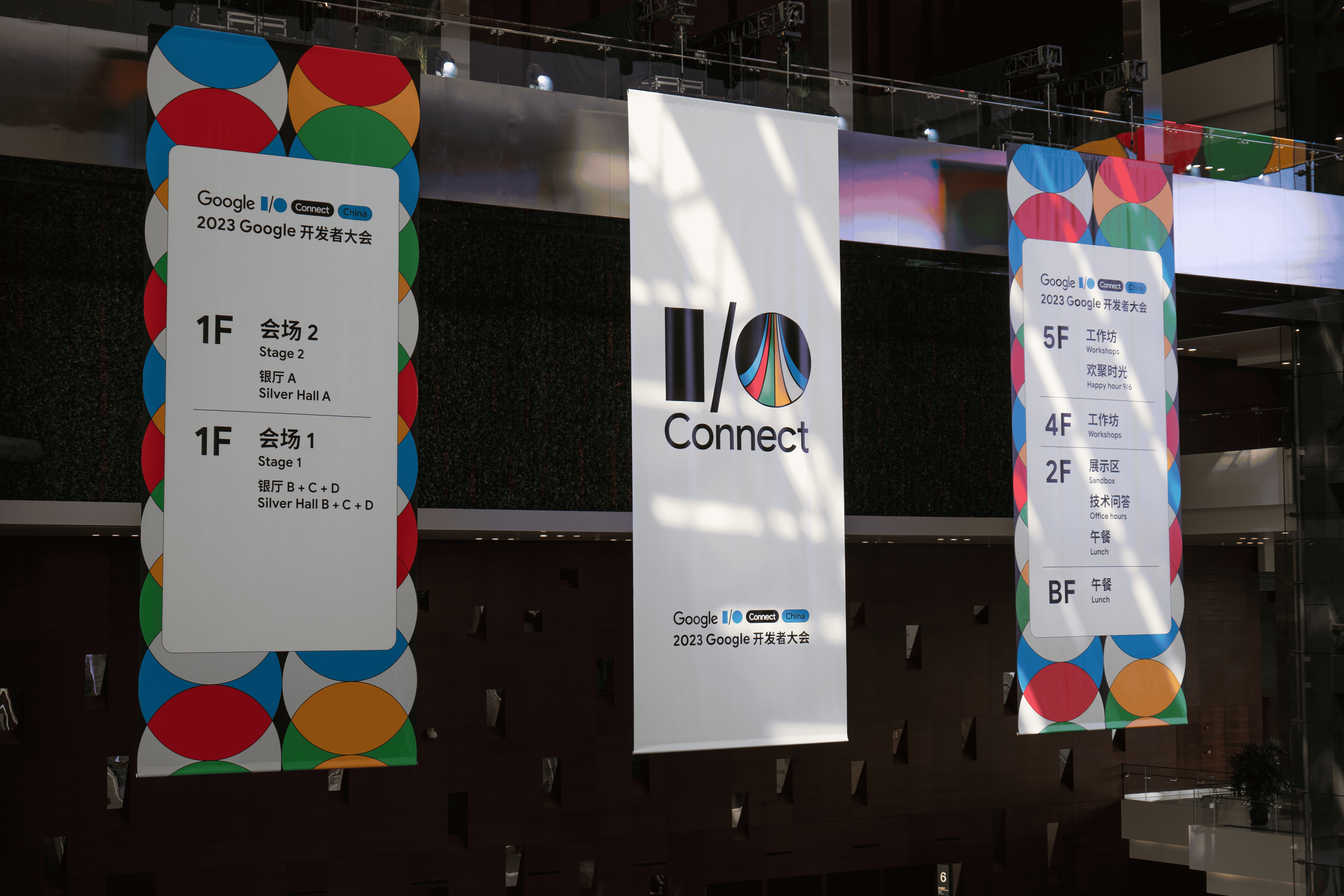
巨大的……可以叫海报吧?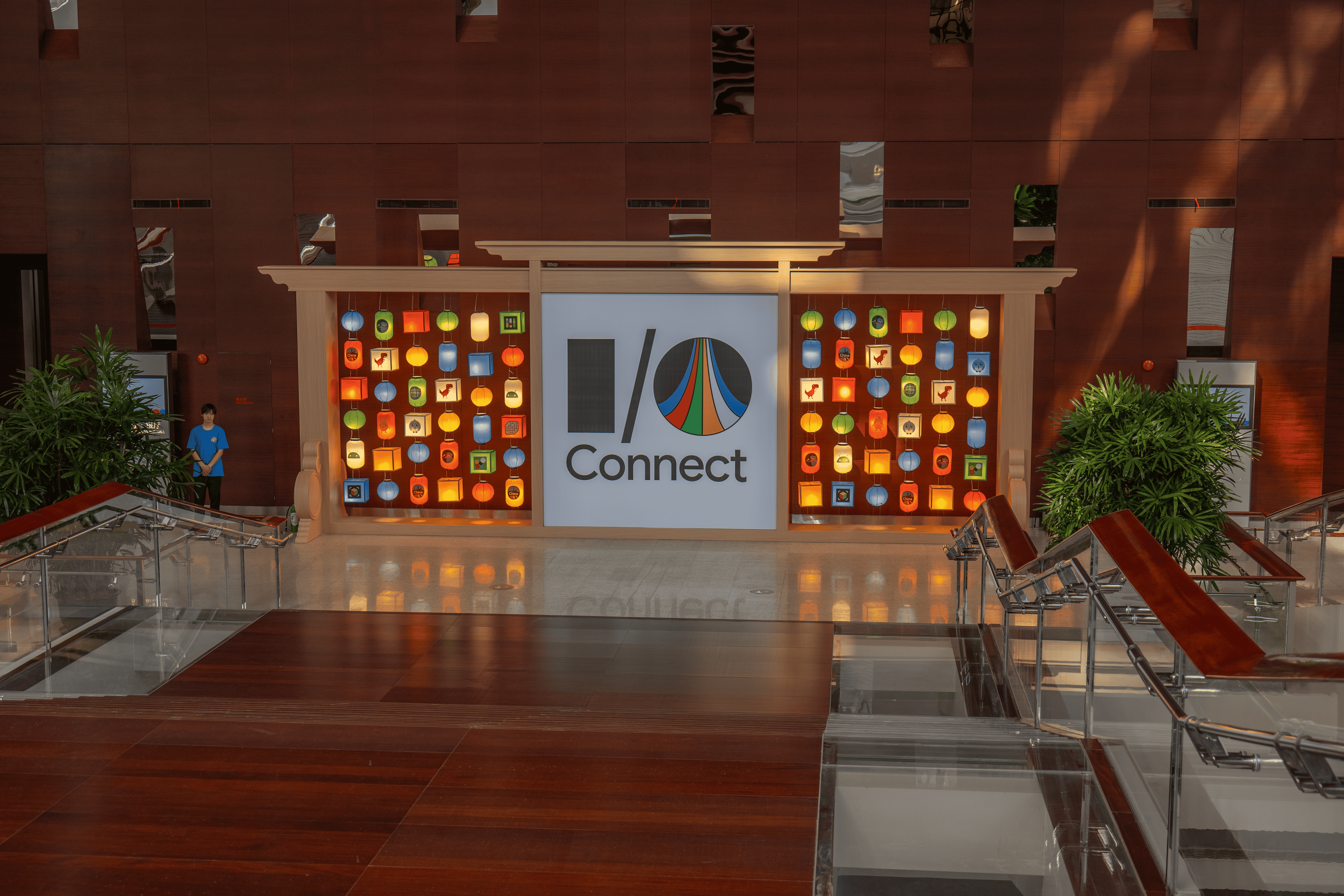

结合了Google风格颜色和中国风外形的背景墙
估计是因为审核相对较严, (怎么把我放进来了) 会场上人并不多,目测最多也就四五百吧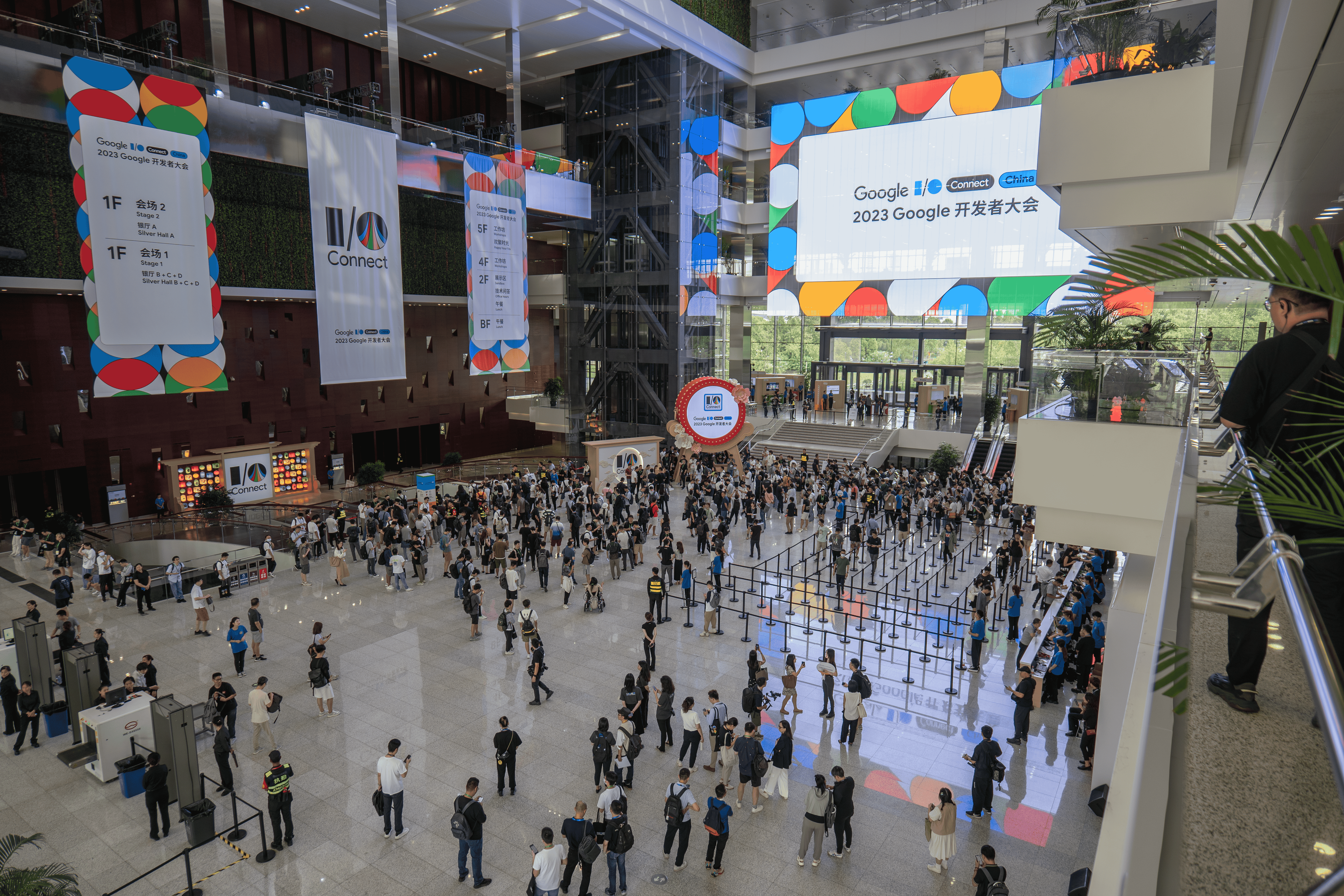
还有苦逼的打工人,到了这还得加班
签到之后领到了小礼品,一个袋子和几个徽章
这设计风格很Google
免费报名的活动还管饭,虽然标配但还是要说一声良心
主旨演讲开始前半小时就放开了所有的区域,可以进入会场了
Google大中华区的总裁陈俊挺,但说中文听起来怪怪的
吉祥物大黄,很符合我对外企在华本地化的想象(
然后就是各路title听起来很牛逼的Google大佬
↑这位是Google Web ML的部门主管,记住他,后面还有
https://ioconnectchina.googlecnapps.cn/speakers/profile/a-jason-mayes-ai02/
以及谷歌的一些技术和计划

这张并不是Keynote,而是后面演讲时拍的
主旨演讲的内容也可以在这里看到
午餐可以凭餐券从中餐、西餐和纯素食中选一份,我这份是西餐,对于我这个不挑剔的人来说味道也还挺好的
全天都有供应零食咖啡饮料,还有一些冰柜里放着文创雪糕
在地图上可以看到展示区的内容
里面也有不少的内容,比如Google一些工具的特性前瞻和一些团队与Google合作做出来的一些有意思的项目
比如这个,给乐高加上硬件接口的项目组,就用乐高积木做了个简单的循迹小车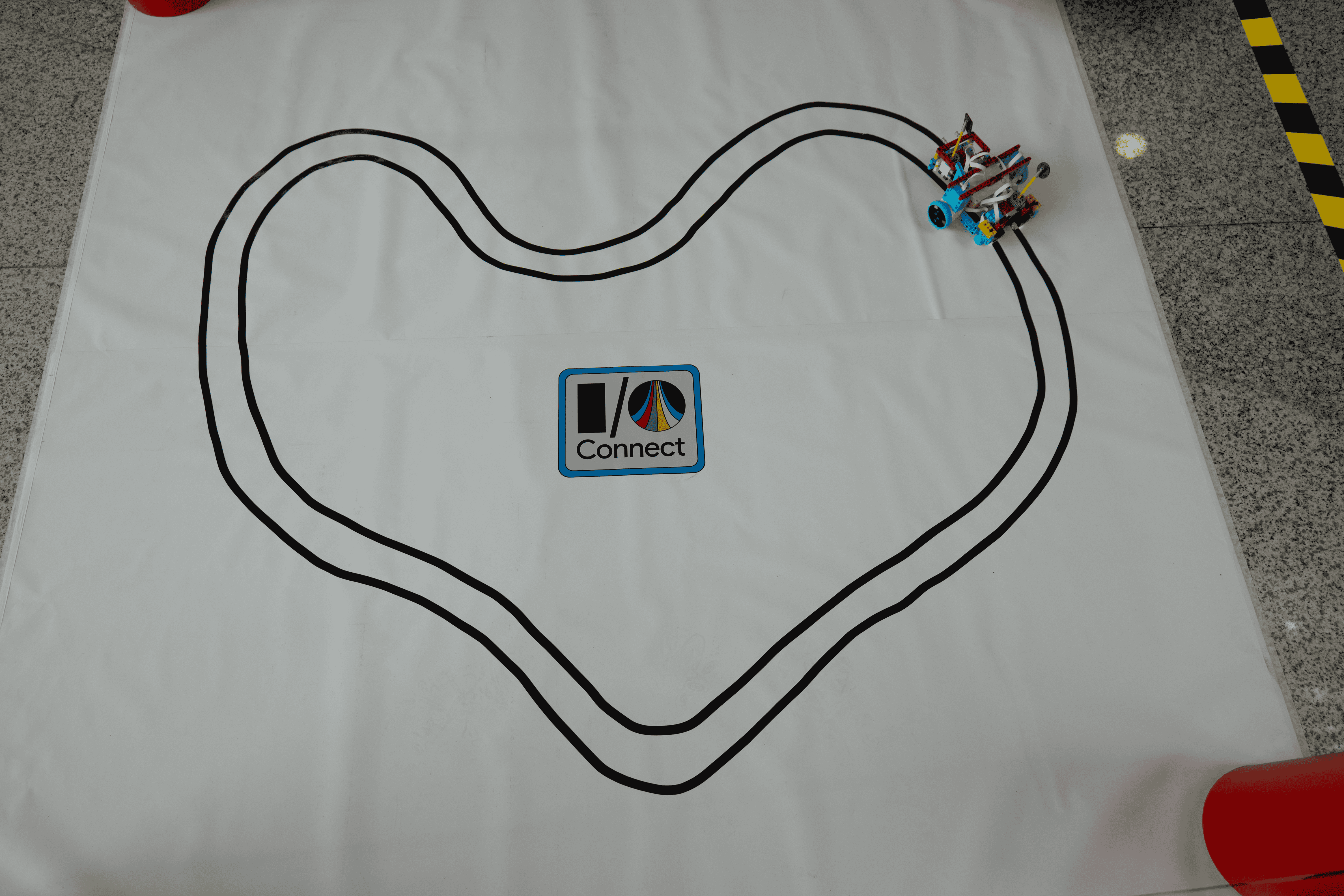
还有一个叫Gameface的项目,用摄像头识别人脸动作代替传统的昂贵而适用性反而更差的专用控制设备,帮助有肢体残疾和渐冻症等的残疾人玩游戏(在主旨演讲中也有提到)
至于反作弊,现场问了下确实是有被反作弊识别为外挂的情况,但我觉得做一个虚拟的控制设备就可以解决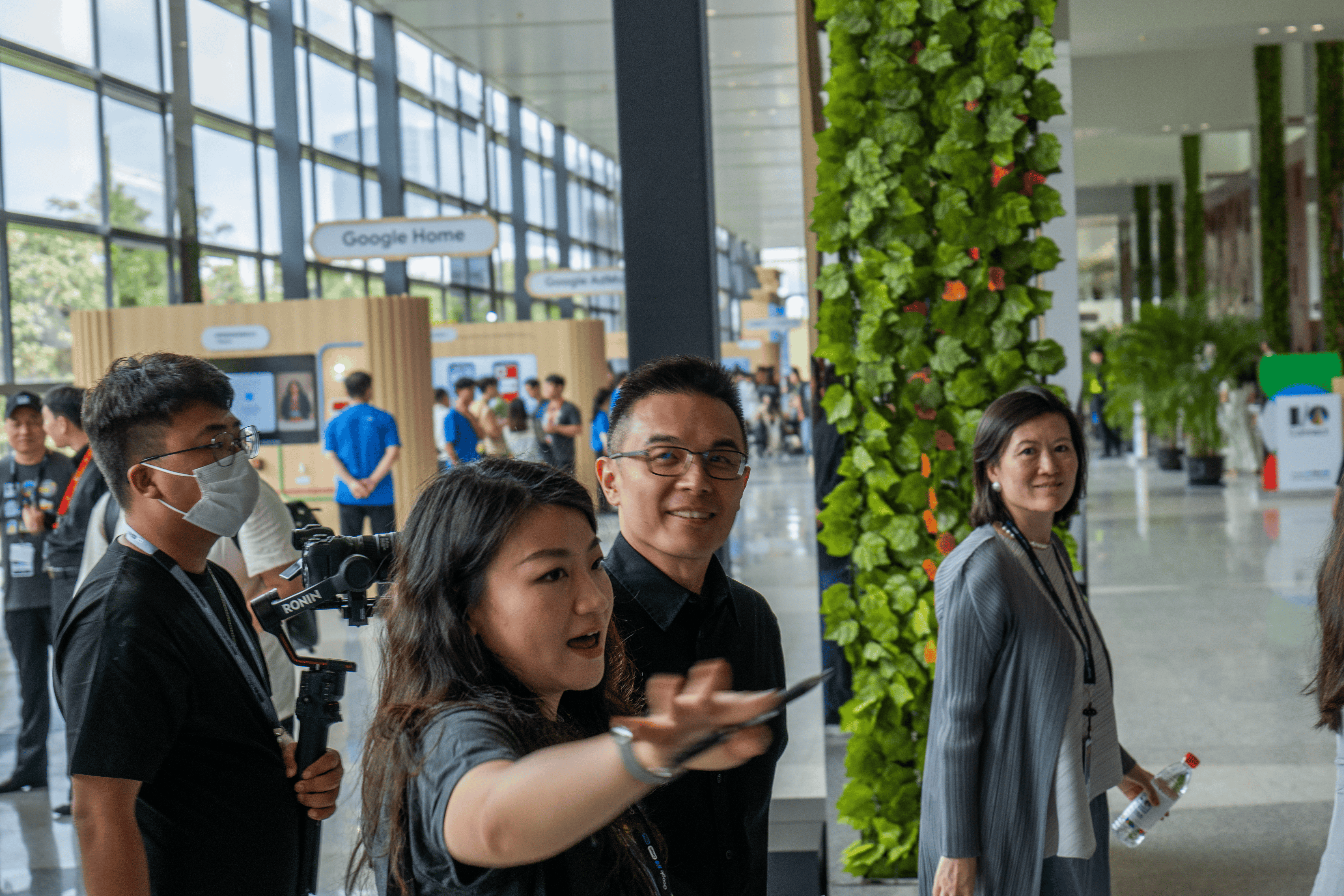
来视察工作的陈总
从现场展示区的布局和主旨演讲中的占比可以看得出来,重头还是AI
但是展示区这里的demo和技术似乎……也没有什么能让我眼前一亮的东西
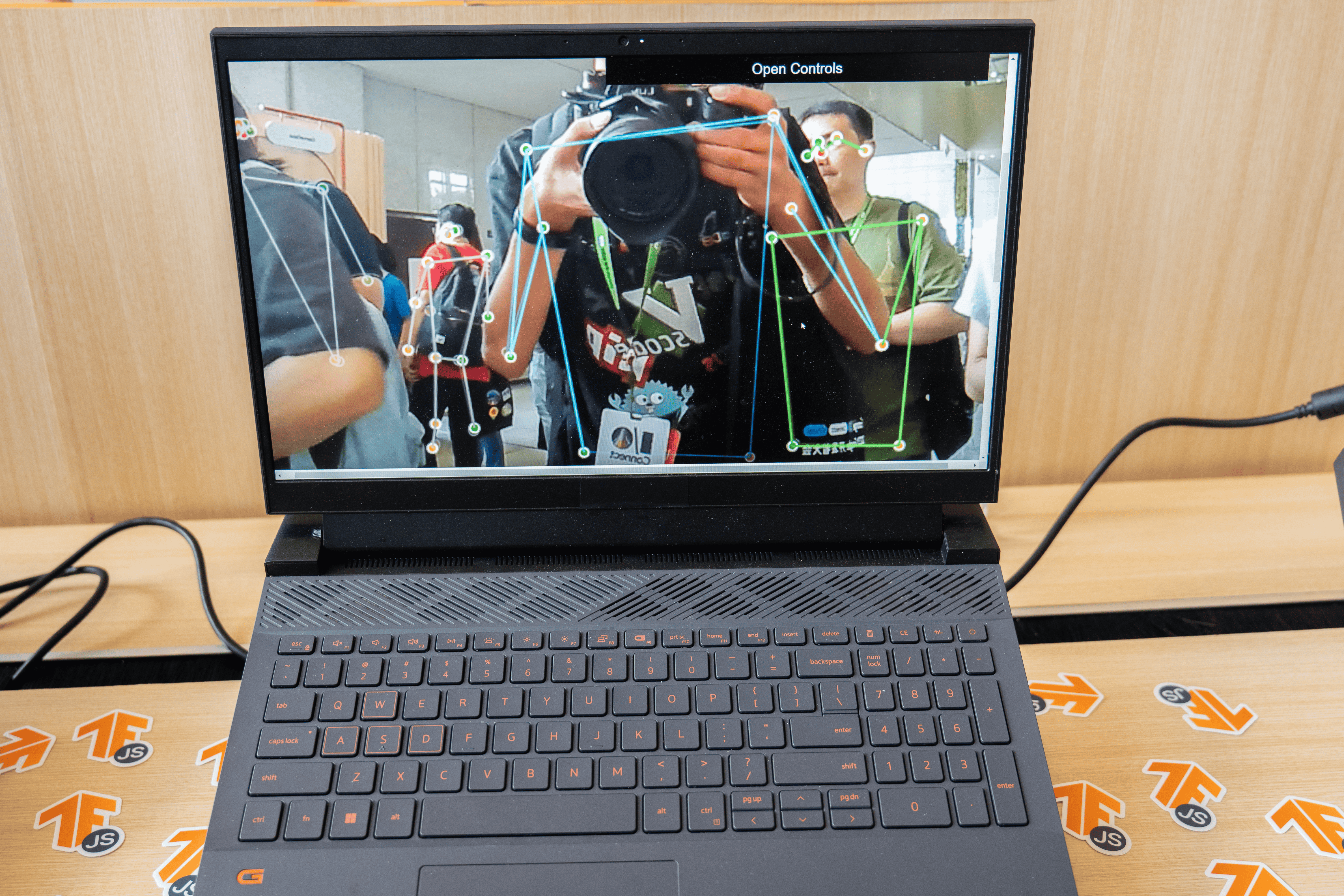
比如这个跑在浏览器里的Mediapipe,但TensorFlow.js也出现好久了,这些基础的CV也不是很重的运算任务,虽然帧数确实跑得很高
看我自己设计的T恤
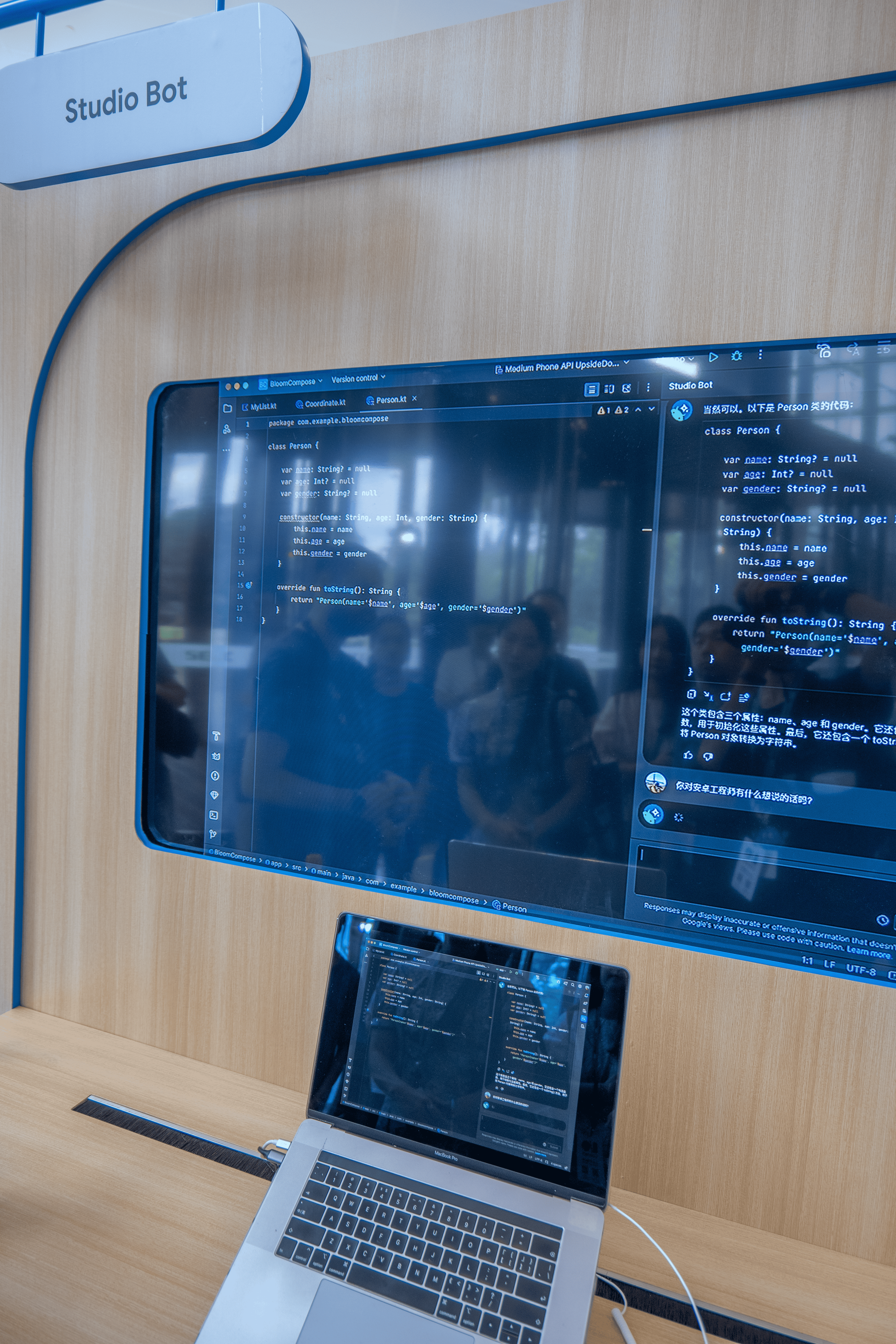
把palm 2集成进了Android studio,问了一下有支持别的语言的计划但并没有移植到别的IDE的计划
以及,工作人员说
Unfortunately, this is only available in the US.
你这些关键词里有几个不太对劲啊.jpg
还有一些flutter啊,passkey啊还有chrome devtools的自动填充什么的这些也没啥意思,拍照都没拍,也没去深入了解
B站看到了三太子敖丙的直播
跑过去蹭了个合照
后来又看到差评君也在直播
还没去找,刚巧他就往我这走过来了,不过看这阵仗,旁边还围了几个人,也没好意思去打扰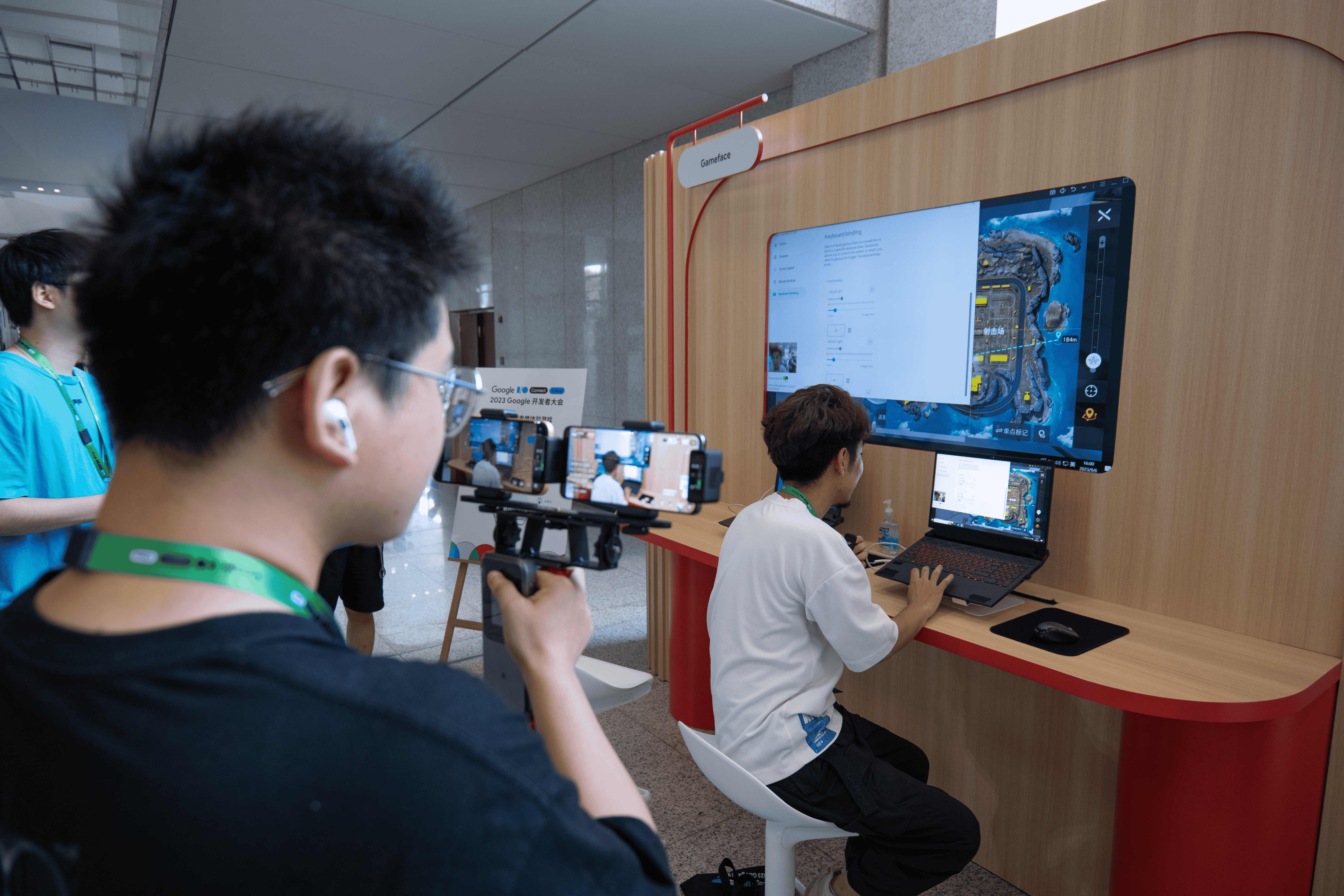
听完主旨演讲往展示区走的路上,看到有好多人围着一位在交流,想这肯定是个大佬,就拍了张照
没想到他看到之后招了招手,我就凑过去跟他聊了两句,顺便合了个影
后来在TensorFlow.js那里见到他了,他甚至认识我了,主动跟我打了个招呼
我看到他展台摆的也是Mediapipe(他对面的是Mediapipe但是注重的是这个模型,而他主要讲解的是在浏览器里运行这个模型),刚巧之前我也用到过这个项目,就只能尴尬地临时想了个问题,问有没有计划使模型泛用性更强,比如让它可以识别猫狗这些动物
可能是我英语不好没表达清楚,也可能是会场太吵了导致他听错了,他似乎以为我问的是如何训练针对其他动物的模型,于是跟我讲了好久you need losts of data和actually you can do this with mediapipe’s code and cats’ dataset
看他兴致勃勃地,我也不好意思打断他,听他讲完之后表示谢意就跑了
然后,突然发现他的挂牌挂绳是代表主旨演讲嘉宾的红色,瞥到一眼腰间别着的工牌上的名字,发现是Jason Mayes
对,前面提到那个Google Web ML的主管
是的……Google Web机器学习的主管,教我机器学习……
再看两眼中国馆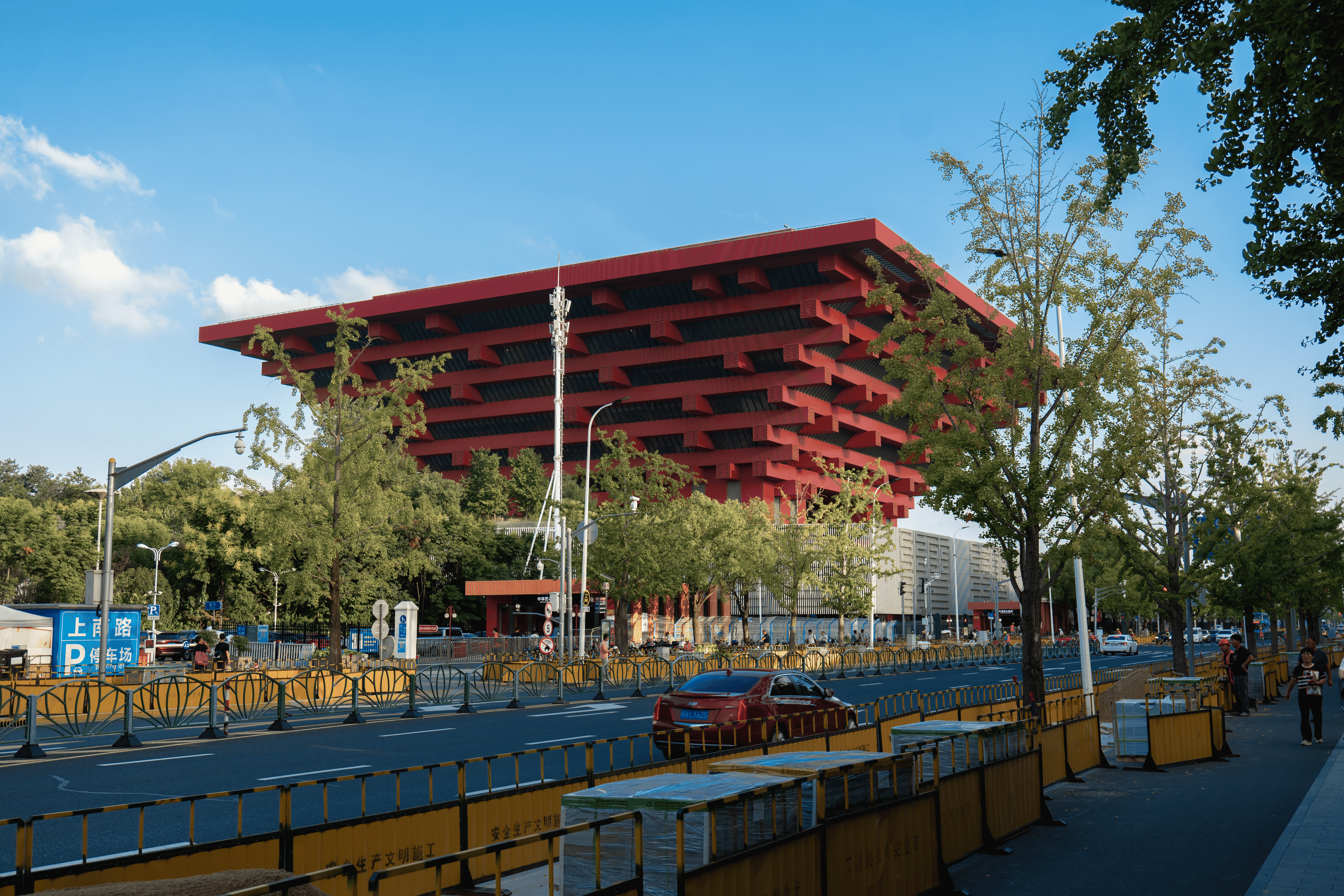

跑路(
开始我觉得通过我的报名表只是审查中的疏漏,没有发现我这个19岁的“C-level高管”
但参与活动后我越来越觉得这更是刻意而为之
我看到了在二楼一张小桌旁围坐着开会的Google员工,他们的神情平等地投入而又专注、眼中闪烁着相同的创意和想象力;主管级的技术大牛愿意为一个几乎没有机器学习基础的准大一新生细致地讲解训练一个能够识别猫的骨骼的模型的步骤
而我在他们的眼里,会不会就是一个未来可期的年轻创业者呢?
虽然现在我不是,但我希望我在四年内会是

我手上的这三颗编号是1097 1739 3246
还有我之前搞到的两颗soma(编号476 2948)
虽然点不亮用不上,这每核15线程[1]的架构只是拿来收藏也挺有意思的
(不过按照结城的说法,成千上万颗+Intel FPGA这两个要求或许就注定民间无法点亮soma了)
首考不甚理想,离我的目标杭电计算机还有大概两百五十分差距。当然语数两门课考到这么高是不可能的,只能寄希望于另四门课有些提升吧
毕竟绝大多数人的高考只有一次,一念之间,一道数学选择题就是五分,哪怕是多了或者少了一分也有可能会极大地改变人生轨迹
不敢期望高考能有什么超常发挥,每门课都能发挥出应有的水平就是很大的幸运了
(这是晚上在操场上拍的星空)
前两天收到阿里云的一份邮件
指向一份公告1月1日国家顶级域名(.CN、.中国)隐私保护服务收费的公告
39一年,虽然有点贵,但为了避免实名上网还是得买 (早知道这还收费就不买cn后缀了)
我还以为很简单,域名隐私保护服务嘛,搜一下就是了。结果找半天,文档里也没有,产品里也没有,站内也搜不到,只能找到一篇2018年的暂停公告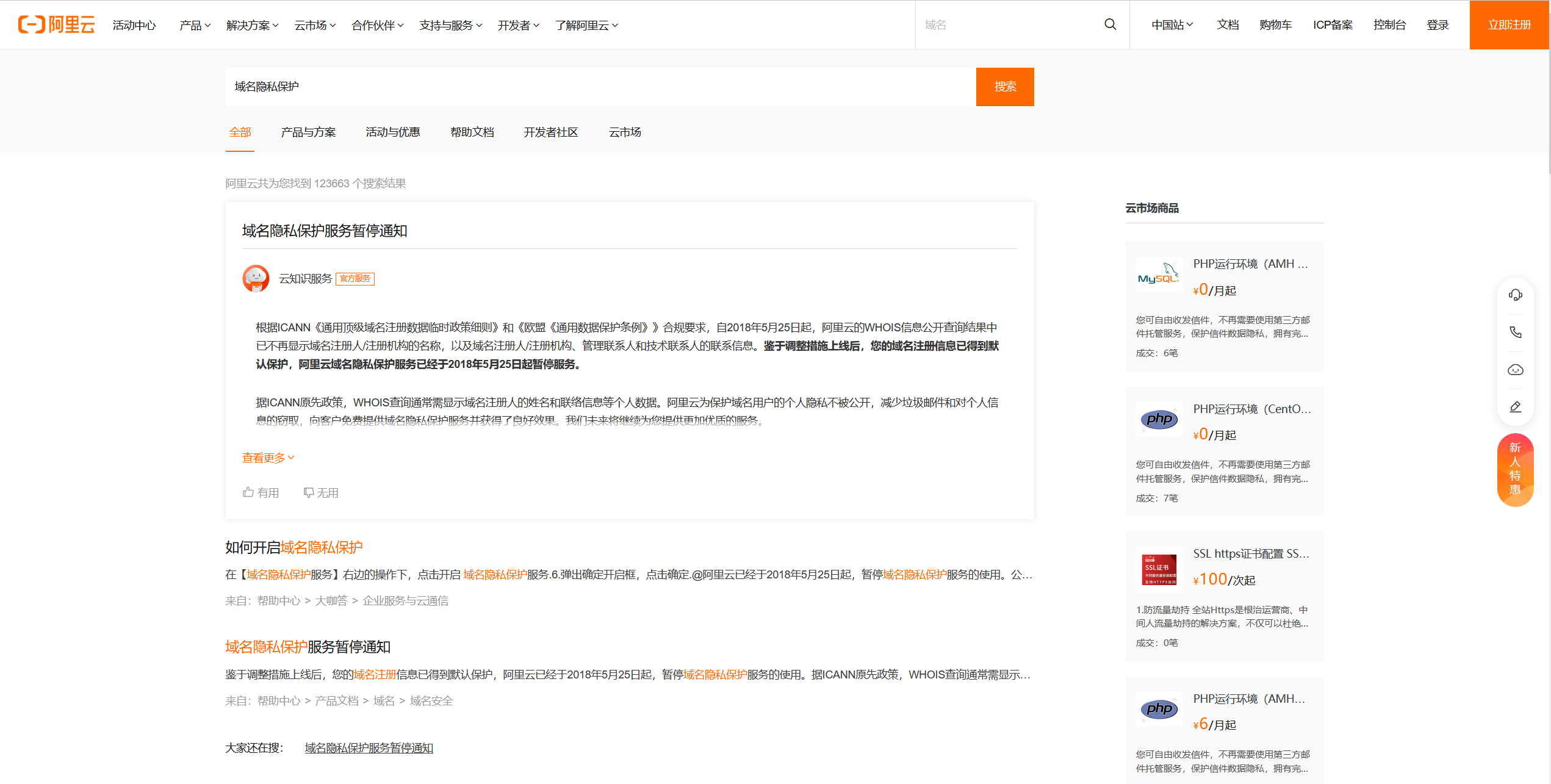
客服告诉我在域名控制台-管理-安全设置里可以开启,结果一看并没有,还有一条“温馨提示”,内容就是2018的那个公告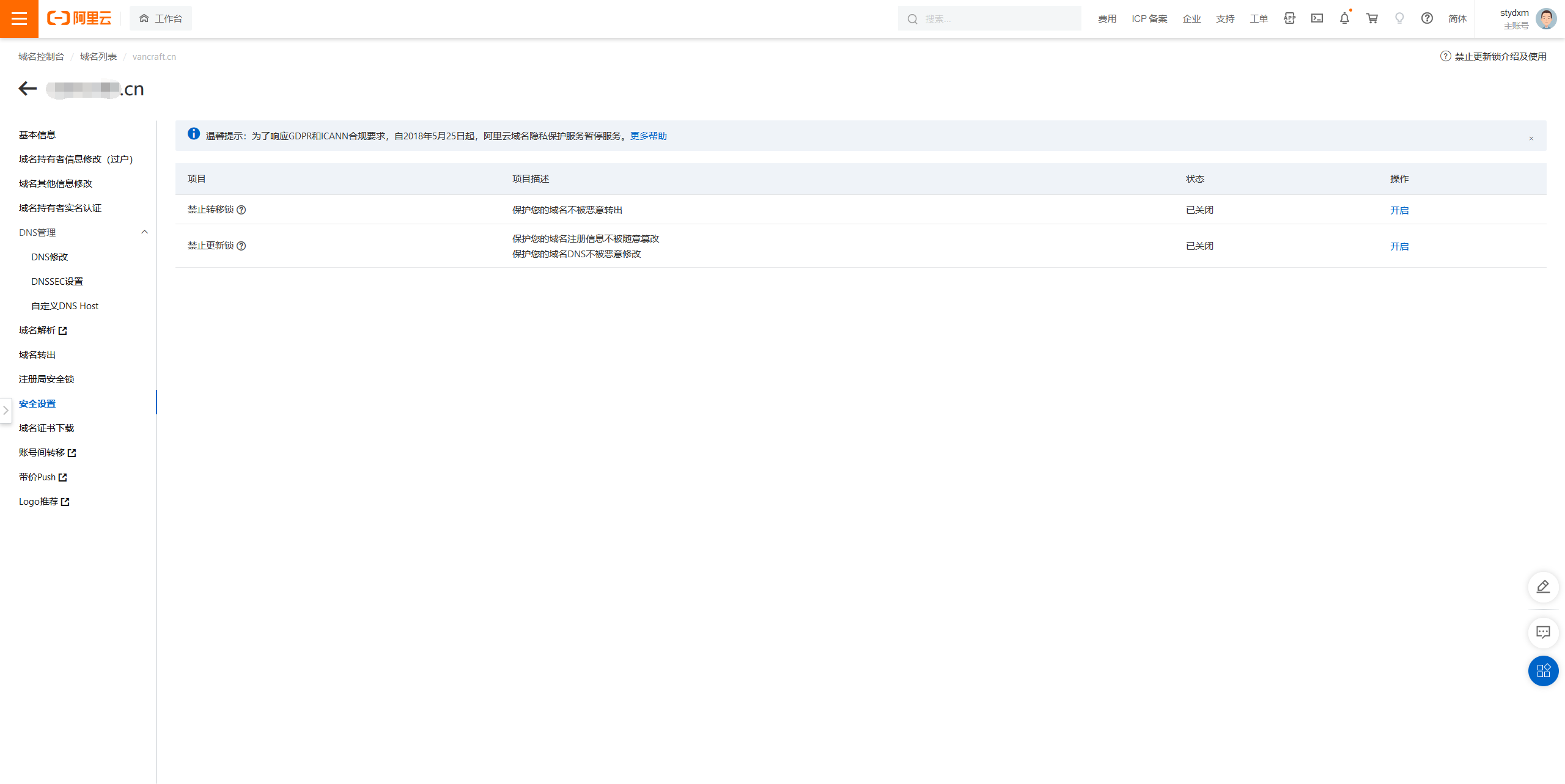
跟客服说了前个客服告诉我的和我看到的情况,结果他略带疑惑地轻声说了句“是已经暂停了呀”,我告诉他我收到的邮件之后他让我稍等(看来客服还没了解这个情况……),然后说要申请,通过短信给我发了这个链接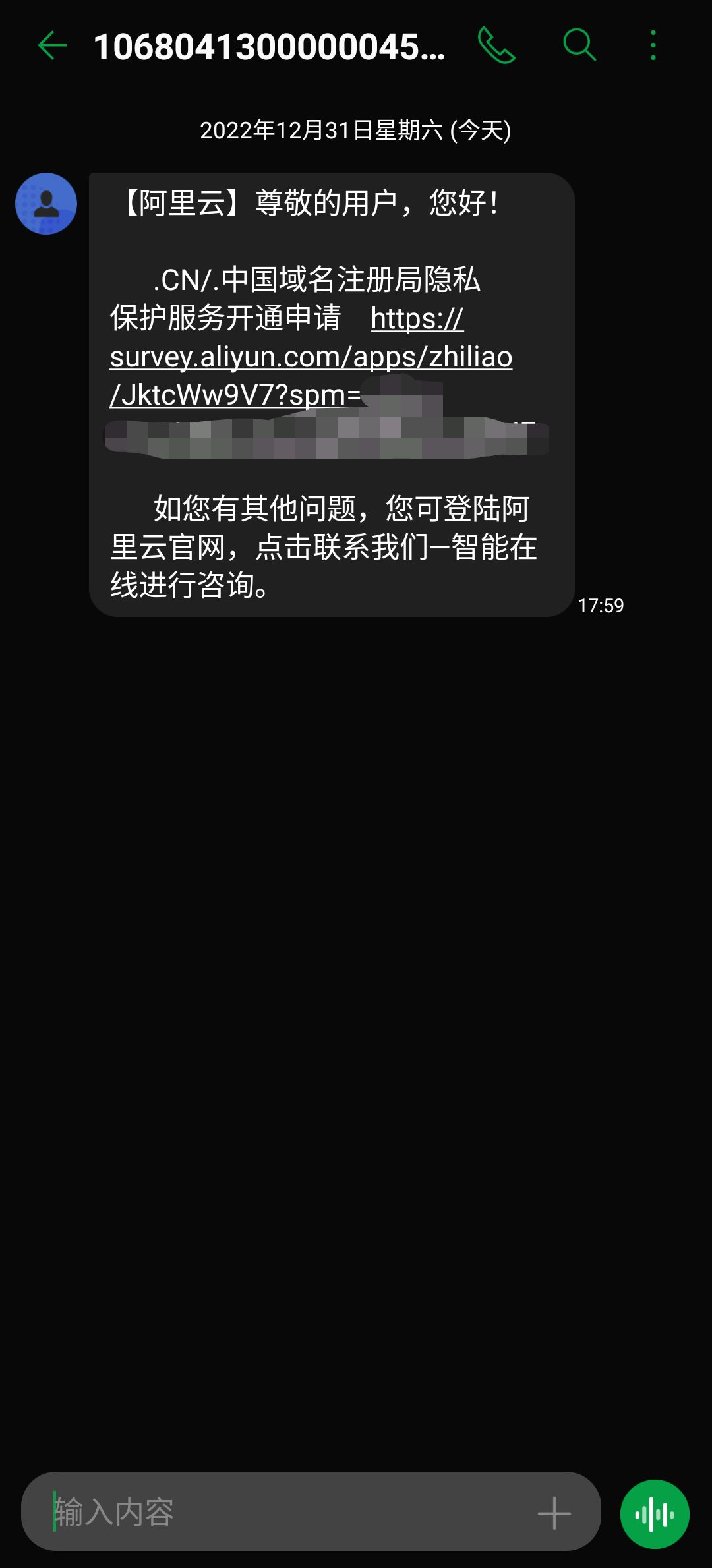
居然这玩意还是填表单申请,人工手动开通的……
1.4不知道能不能完成呢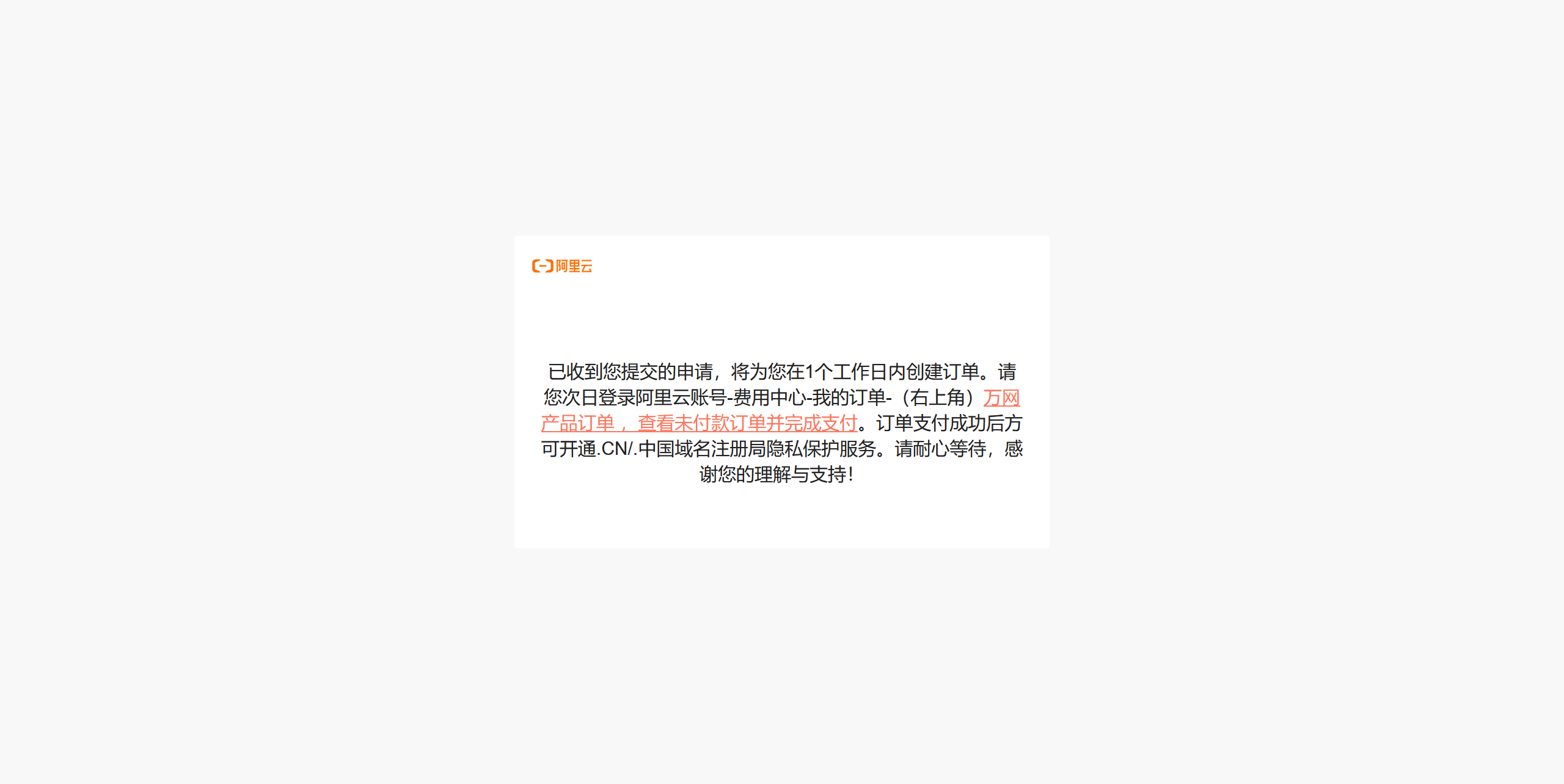
2023.1.4 update
1.4打开阿里云看到了账单
居然提示消息还有模板字符串没替换的bug?
2023.1.8 update
本来以为完事了,结果收到一封邮件
到后台一看,猛然发现有效期就4天
说好的39一年呢???怎么只有四天???
客服表示“反馈专员核实”,那就只能先等着了
2023.2.27 update
似乎早就给开了,不过没有提醒,我也不知道是什么时候修正的问题
]]>Never underestimate the bandwidth of a station wagon full of tapes hurtling down the highway. – Andrew S. Tanenbaum[1]
前几天看到一张表情包,大意是可以用卡车转移数据到aws
本来以为是玩梗,没想到去搜了一下之后发现aws真的有这样的服务,叫做AWS Snowmobile

查资料的时候发现已经有人给直接移动储存介质的传输方式取了个名字——Sneakernet,中文叫球鞋网络或者跑腿网络[2],于是就想写写关于大量数据传输的内容
在云计算时代,如果企业要从传统的机房迁移到云服务商,势必要传输大量的数据;当数据达到一定量的时候,从企业自己服务器的硬盘传到云服务商的储存中去也是很困难的事,云服务器为了方便客户迁移,也给出了各种迁移方案
查资料的时候也发现aws已经推出了很多sneakernet的服务,所以下面提到云服务商的时候主要以aws为例 我看到snowmobile才想要写这篇的
通过网络传输数据是最常规、最简便的方法,对于绝大多数个人和企业的非业务数据,直接通过网络传输数据方便快捷,必然是首选
但是对于数据规模较大的情况,即使不考虑大量数据上传的网络带宽费用,即使以千兆网络的理论速率,每周也只能上传约75T的数据
这样的速率对于数据量稍大的情况来说——比如企业的数据库、科研数据等——意味着需要付出很长的时间和不小的流量开支,而且耗时太长
当数据量大到网络传输数据的耗时不可接受时,就需要使用sneakernet传输数据
以aws为例,他们已经有很多[3]专门用于数据上云的服务了,其中的Snow系列就是sneakernet的应用
Many years ago, professor Andy Tanenbaum wrote the following:
Never underestimate the bandwidth of a station wagon full of tapes hurtling down the highway.
Since station wagons and tapes are both on the verge of obsolescence, others have updated this nugget of wisdom to reference DVDs and Boeing 747s.[4]
早在2009年3月,阿里云和azure都还不存在的时候,aws就推出了这个服务
客户可以把小于50磅、8U[4:1]的储存设备寄给亚马逊,亚马逊会把里面的文件导入S3
不过目前这个服务已经停止了,博客中留的产品页面现在会被重定向到snowball,大概是因为已经有其他更成熟、更细分的服务可以上云了吧当年用来计算耗时的计算器居然现在还能用
虽然由于物理接口速度的限制(当时的USB 2.0和eSATA都还不到千兆),每周只能传输大概40-50TB的数据,现在看起来速度并不快,但对比当时的网速这并不慢,不妨是一种成功的尝试
清华也运过有700TB实验数据的磁带[5]
We launched the first-generation AWS Snowball service way back in 2009. As I wrote at the time, “Hard drives are getting bigger more rapidly than internet connections are getting faster.” I believe that remains the case today. In fact, the rapid rise in Big Data applications, the emergence of global sensor networks, and the “keep it all just in case we can extract more value later” mindset have made the situation even more dire.[6]
2015年10月亚马逊推出了Snowball,速度提升到了每周1PB[6:1],而且有了实体的设备

这个snowball设备就是个箱子,有电源、网口和一块屏幕,我猜测内部是类似普通开发板的架构和一些硬盘,最多可以储存50TB数据[6:2]
它的使用方法变成了客户在内网里向snowball写入数据,然后寄给亚马逊,亚马逊会进行导入
做出这样改变的原因我猜测是这样标准化的设备在亚马逊的数据中心里可以自动化操作,而以前五花八门的设备显然做不到;而且manifest由程序自动生成,方便使用的同时也减少了错误
aws另外发布过Snowball Edge、Snowcone这些设备,只是介质和容量有所不同,其他也都大同小异

azure也有类似服务,叫Azure Data Box,有40TB的Data Box Disk、100TB的Data Box、1PB的Data Box Heavy三种,这里讲讲“标准款”的Data Box

它有一个电口两个光口,共三个万兆接口
GCP也有这样的设备Transfer Appliance
Google只说了有40TB的TA40和300TB的TA300两种型号,但甚至连一张照片都没有发属实保密程度高
这就是我当时看到的那个卡车拉硬盘的服务,aws更是把卡车开到了发布会上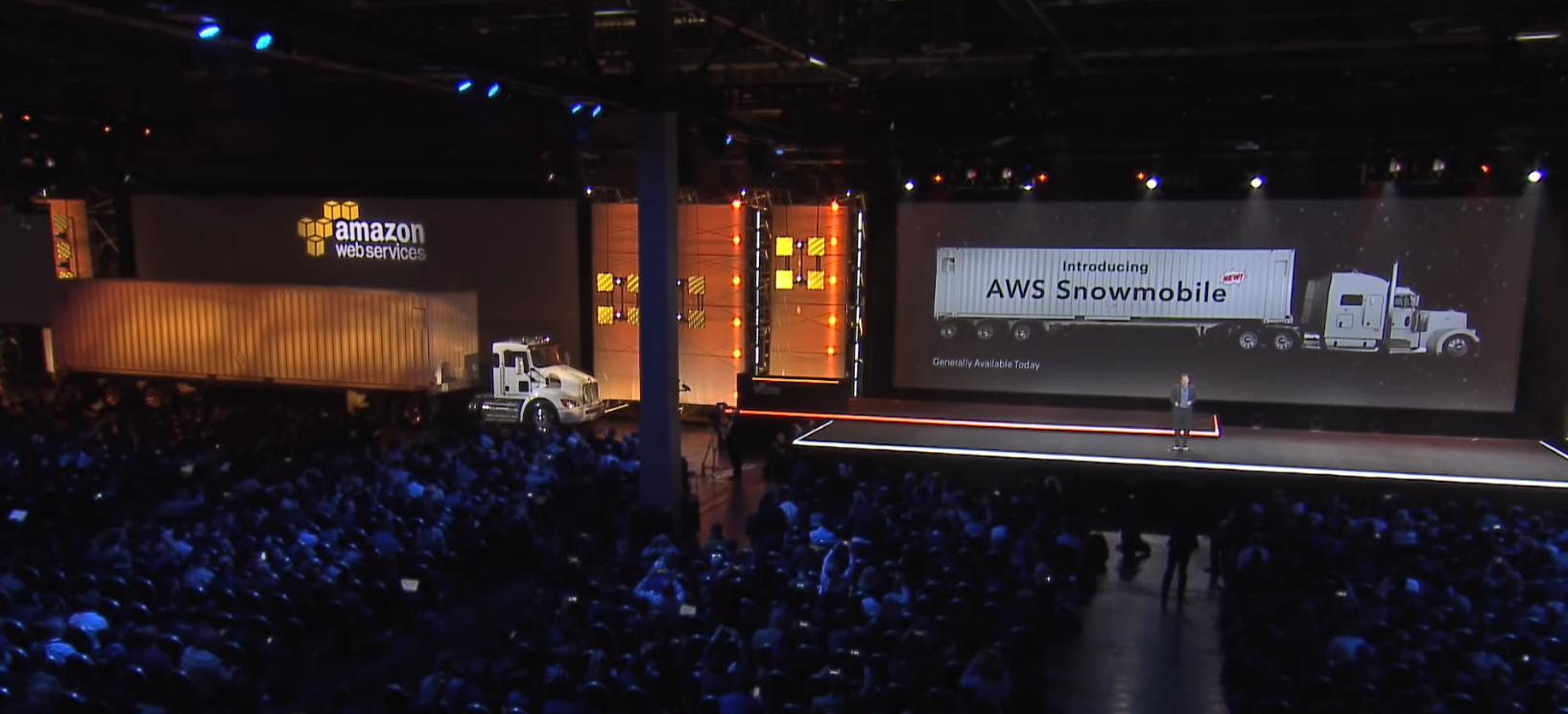
确切地说,snowmobile并不包含卡车,而是一个集装箱
它可以储存100PB数据,有共计1T的网络带宽,可以在几周内传输EB级的数据钱给到位,亚马逊甚至可以给你安排发电机、安排车辆护送、安排安保人员哦
这里的仅供图一乐
应该没人真的会这么用吧
全称IP over Avian Carriers,以鸟类为载体的网际协议,来自rfc 1149,这是一个愚人节rfc

并且还真的有人实践过:2001年四月,挪威卑尔根的一个用户组发了九个“包”
rfc1149甚至还有修订版,即加上了QoS的rfc2549和支持IPv6的rfc6214
Tanenbaum, Andrew S. (1989). Computer Networks. New Jersey: Prentice-Hall. p. 57. ISBN 0-13-166836-6. ↩︎
AWS Import/Export Snowball – Transfer 1 Petabyte Per Week Using Amazon-Owned Storage Appliances ↩︎ ↩︎ ↩︎
看视频里的实现方法[1]简单而且效果不差,懒得再去找更好的方案了,就直接拿来用吧
1 | # 调用电脑摄像头进行实时人脸+眼睛+微笑识别,可直接复制粘贴运行 |
暑假里搞了几天MediaPipe,不敢说有多精通,至少是搞明白怎么用了,所以毫不犹豫地选了MediaPipe Pose
1 | import cv2 |
随便Google了一下,找了个叫mss的库
1 | from mss import mss |
这个也没去找,视频里的代码一眼看到了PyAutoGUI
1 | import pyautogui |
注释写的比较详细,基本每步都有注释
1 | import cv2 |
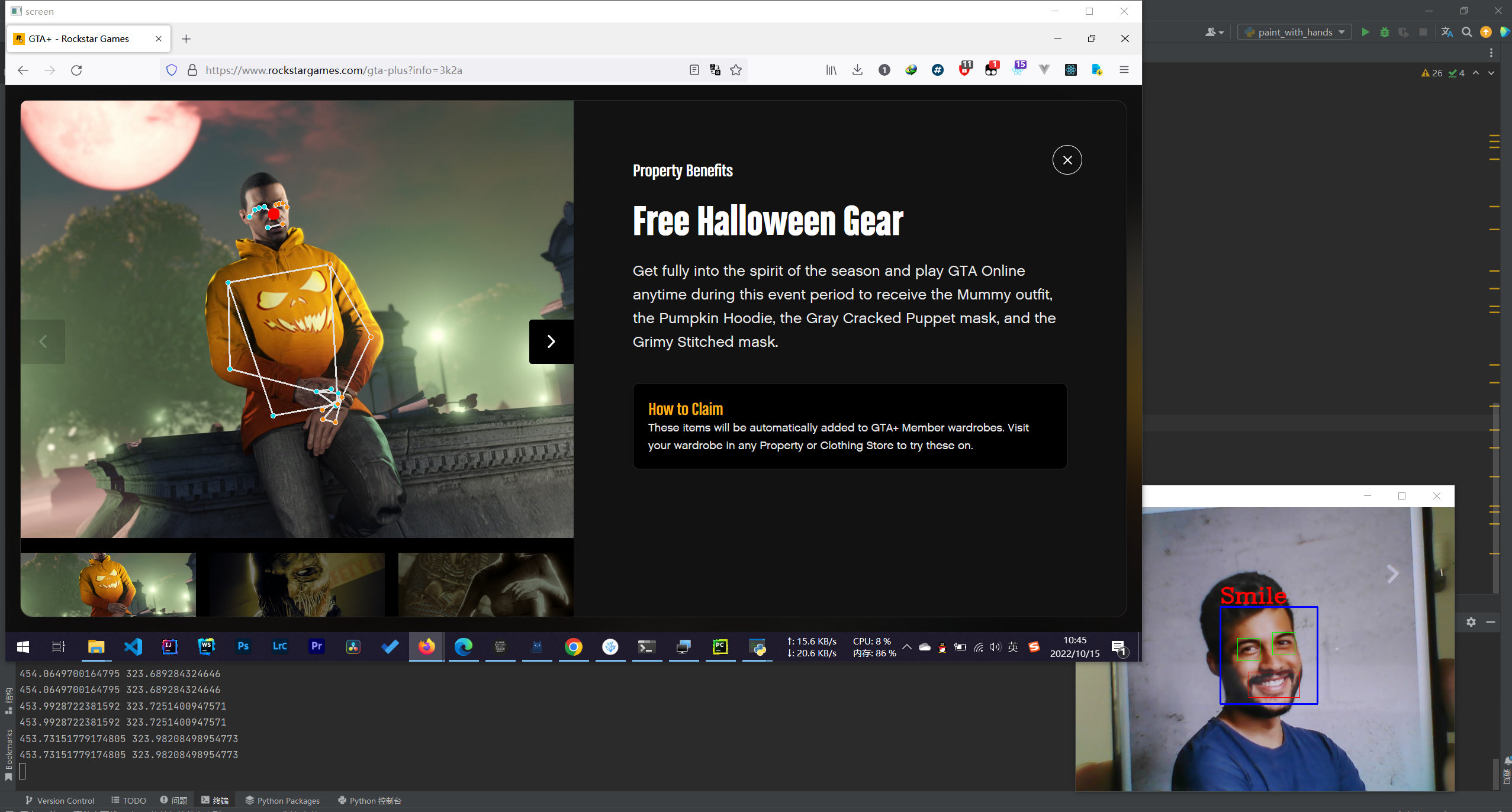
用的人脸照片是Pexels上随便找的一张
在游戏里没敢试,因为怕被反作弊识别然后号没了
识别表情、识别人体都没啥问题,也能正确地把鼠标移到屏幕里人的头上
找了各种肤色、情绪的笑脸照片,都能正确识别,唯一的问题是图片放到摄像头之后要过几秒钟才能识别出微笑,不过也没什么太大问题了
为了模拟真实情况 谁真去用啊 ,不仅试了常规照片,玩过的几个游戏(GTA5,BF5,RDR2等)截图也试了一下,人物靠得近一点就没什么没问题了(太小的识别不到)Steve和Alex都识别不了,差评
检测微笑的卷积神经网络性能很好,至少在我的机器上完全观察不到卡顿;但mediapipe的pose模型检测1080P的画面时,在我的5800H上目测最多只有十几帧
mediapipe的模型是跑在CPU上的,我电脑上还有一块3070 mobile,所以我的想法是使用GPU加速,虽然文档里有GPU加速相关的内容[2],但是写的是面对Linux的,可惜大多数游戏在Linux上无法运行或体验很不好
并且,mediapipe的模型是TF lite的,而TF lite主要面向移动设备,并没有计划开发windows平台的GPU加速[3],所以未来如果要解决这个问题,我的想法是使用性能更好的模型或者有较完善GPU加速支持的模型
markdown-it-footnote可用,所以也不用怎么折腾,但是有几个坑markdown-it-footnote的README写着
Install
node.js, browser:
2
bower install markdown-it-footnote --save
但并不是装上这个库就能用脚注了 (踩坑了)
首先markdown-it-footnote是Markdown it的一个插件,所以先把hexo默认的hexo-renderer-marked渲染引擎替换成hexo-renderer-markdown-it
1 | npm un hexo-renderer-marked --save |
这一步挺常规的,然后就是插件需要手动启用 没仔细看readme
在配置文件_config.yml里加入markdown这个字段,并启用脚注插件
1 | markdown: |
于是,就有了罗老师(网传)发的这段话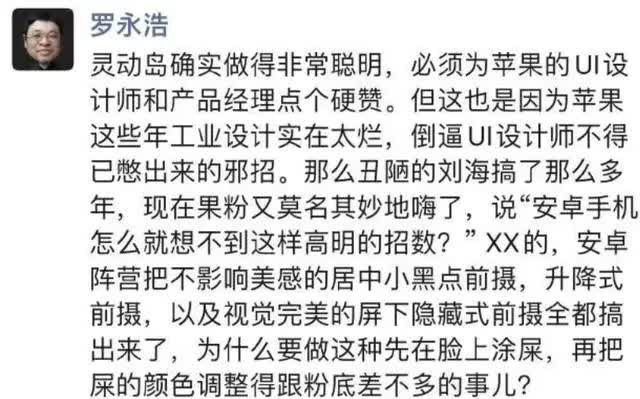
诚然,这个UI设计确实做得很优秀,但也反映了手机创新的匮乏——一年的代差,区别居然只是UI上的动画。再往前看,iPhone X之后也没有什么没大的进步,只是收窄刘海和加摄像头。然后顺着这个想法来理一理近年来手机领域的 《创新》
我认为这十多年来,自从智能手机正面屏幕、侧面按键、反面摄像头的格局定下来之后,手机形态上唯三有点创新而且能被主流市场认可的就是全面屏、折叠屏和屏下指纹了
当然并不是说没有进步,处理器的算力不断提升,摄像头越堆越多,全面屏出现后屏占比的百分之几的提升,内存、储存甚至一路提到18+1t,现在主流游戏本大多还是16+512
手机的设计并非真的一成不变,不同手机间的差异化也不止在纸面的数据上体现
手机销量最高的几个品牌故步自封,精力一直花在卷参数和做营销上;索尼、LG、谷歌、微软这些不差钱也不把手机当主业的厂商反而能做出一些让人眼前一亮的新设计,但不能
升降摄像头里最常见的是机械升降一个摄像头模组,太多了就不举例了,那个年代的新机一眼望去全都是这样的,其中有个特例是OPPO Reno的扇形摄像头模组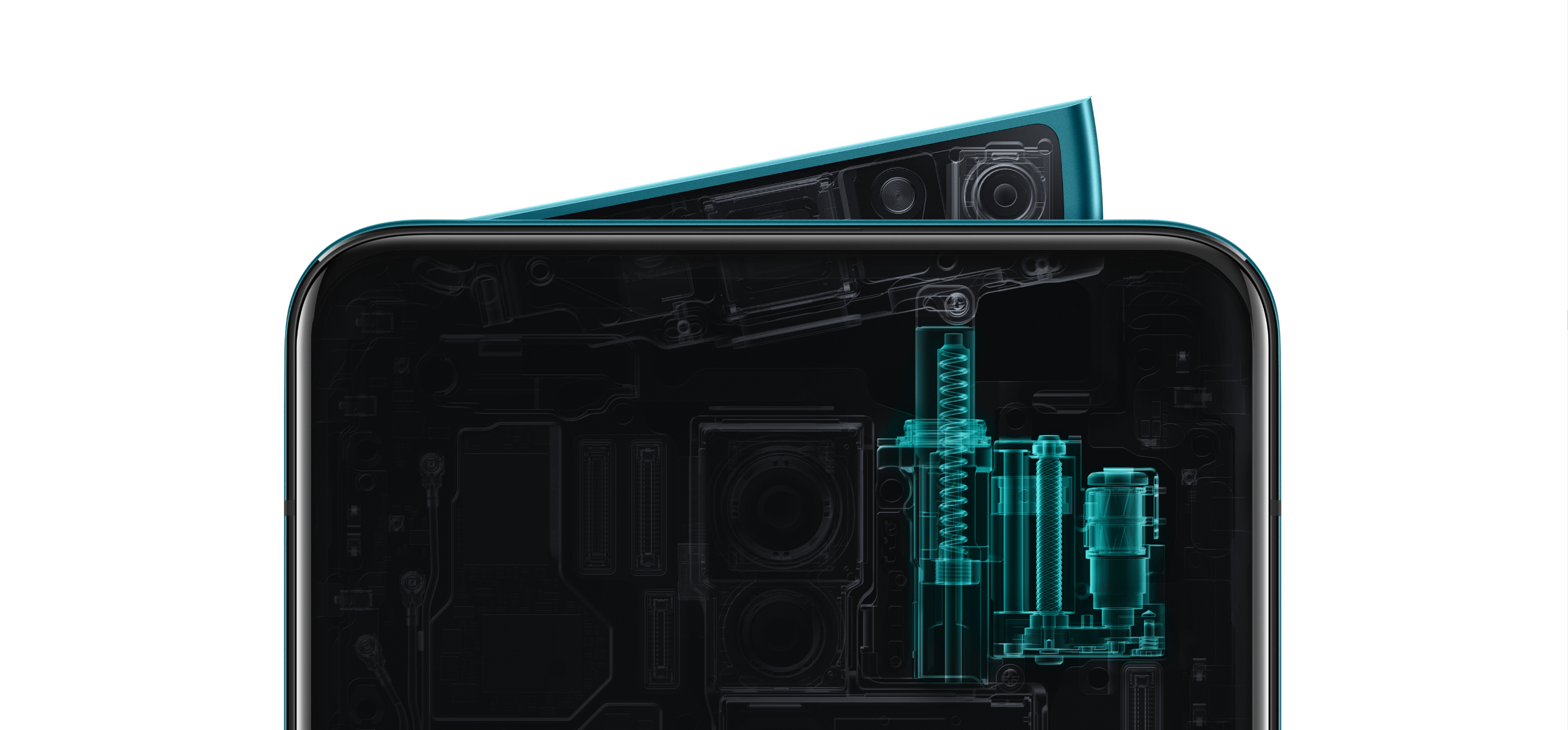
升降摄像头还有一种方案是略显复古的滑盖形态,保证完整屏幕的同时减少了机身内的机械结构(手动的所以不需要电机了),减少了厚度和重量,腾出更多空间
典例:荣耀magic2、OPPO find x
像nubia x, vivo NEX 双屏版这样的正反面双屏在我看来这是为了正面完整屏幕砍掉前置摄像头后,对于自拍的解决方案
少了前置摄像头,加了一块屏幕,耗电和成本上升,而且仍然是一个妥协的方案,除非手机烫手翻来翻去看
像LG Wing、LG的副屏手机壳、Surface Duo这样的单面多屏的形态在多任务处理上有着显著的优势,但多出来的结构会导致续航差、机身厚重这些问题,而且也没有手机大厂尝试这样的设计,也一直没能得到主流消费市场的认可
还有诸如LG Rollable卷轴屏、MIX Alpha的环绕屏等的方案,最终都没能实现量产开售,所以说目前谈论它们还为时尚早,只能说让我们一起期望手机厂商能做出真正 有意思 的设计吧
从我开始关注数码圈开始,这几年来手机届所谓的“革新“实则却是营销,内存从3G、4G一路来到了18G,摄像头像素从1200w到了108m,无数所谓”黑科技“实则是根本没用或科技以换皮为本的概念被创造出来
手机市场早就从增量变为存量,手机的差异越来越少,外观也就是在背板和摄像头排布上做文章,翻了好几倍的纸面参数在实际体验中究竟带来了多大的提升呢?恐怕不大
灵动岛是一次有意思的尝试,是对挖孔屏交互方式的一种探索,但效果显然不如直接做成无孔的。这是创新吗?当然是;这创新有意义吗?不如研究研究怎么解决屏幕上的孔,而不是花时间研究怎么把孔做好看
苹果这么做的“成效”也显而易见。苹果在产品设计上的变化本就自带话题属性(从google trends上看得出来),从刘海到摄像头突起,从取消3.5mm耳机孔到为了所谓环保而不再赠送充电头,这些变化都少不了用户的批评,很多主流手机厂商还是照样跟进。苹果这么做顺便还做了免费宣传——但凡关注数码科技领域,谁又不知道灵动岛呢?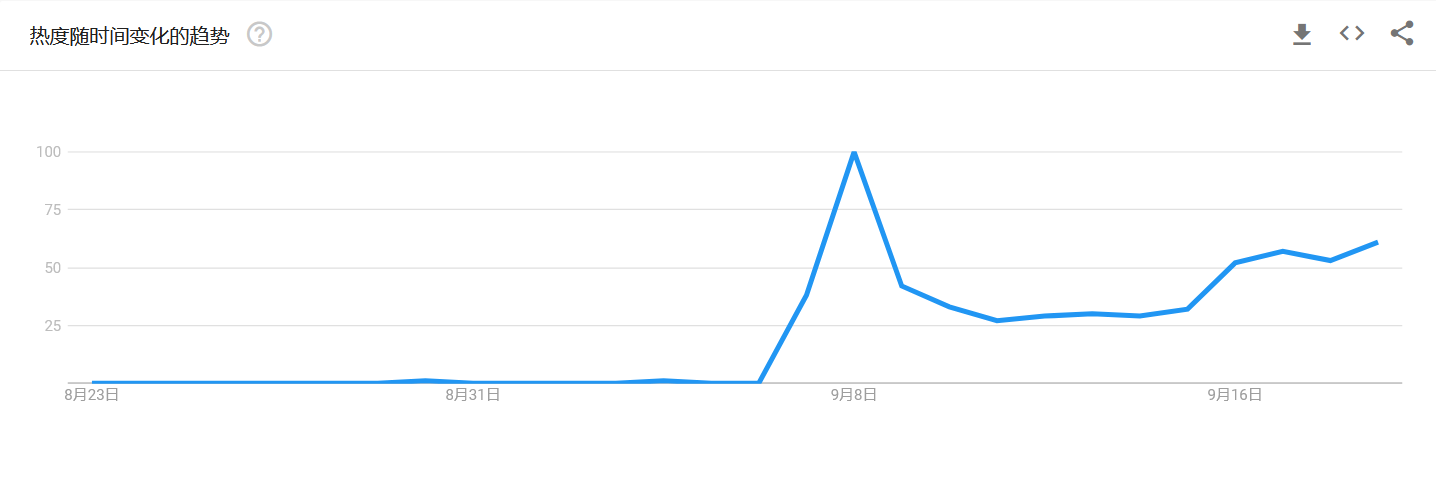
更高的参数固然好,结果带来的是软件优化越来越差,对性能要求越来越高(比如某国际游戏大厂的两款手机3A大作),用户为了其实大可不必的性能消耗而不得不购买更好的硬件,但真的是用户想看到的吗?
至少对我来说,与其花费人力物力研发被软件浪费掉的性能,我更想买到体验上有提升的设计、有意义的创新。我不是说更好的性能更高的参数没有意义,而是说应该把这些研发成本投入到更有意义的东西的研发上去
图片较多且都未经压缩,可能加载会有点慢
2020年9月,发布会结束后,LG wing的图片着实让我惊讶,但在当时它和我没什么关系,售价1049美元且没有国行,而且LG手机一贯的垃圾佬特质 过一年就能海鲜市场半价捡 让我根本没有买它的想法
不想不到一年时间,卖了26年手机的LG宣布由于亏损而放弃了手机业务,也让这个形态独特的手机成了LG最后一款公开发售的手机 当然海鲜市场价格又低了
发布后还不到两年,即使是成色完美的机器在小黄鱼上已经不到1.5k了,自己又想换手机了,就花1.7k买了个成色完美、号称原装未拆机的LG wing。至于为啥这么贵,因为当主力机用,而且用的电信卡,买的是8+256的att版的
(LG wing有多个版本,对大陆地区的网络支持不同,二手价格也不一样。韩版的不支持三大运营商,也就是只能用WiFi上网;T版,也就是T-mobile版,只能支持移动联通的流量和电话、短信功能;V版,也就是Verizon的,支持三家的流量,但是要手动切换电信的4G和2G,据说移动联通5G也可以;att版,也就是AT&T版,支持三网5G和2G [1] ,但是我测试发现似乎不太行,应该是不能完全支持电信5G的频段,所以有人说行有人说不行,我也不太在意能不能用5G,就没再折腾)
手机到手给人的第一印象当然是外观和手感
手机外观我也不太在意,正面几乎全是屏,后面是玻璃后盖+三摄,觉得很漂亮了,看渲染图好像蓝色版本的更漂亮一点,不过反正戴个壳都一样

手感的话前后的曲面握起来还是比较舒服的,厚有点厚,超过1cm了,但可以捏着边框所以影响也不大
机器确实比较重,260g的质量已经接近主流折叠屏(左右翻折的那种打开较大的)的手机了,这是在买之前就了解清楚了的。到手之后还是比想象中重一点,反正对我这样三四斤的单反+镜头一拿一整天的人来说也没什么,用了两三天也没有手酸手臂痛 现在拿别的手机已经感觉轻飘飘了
这个手机最特殊的就是那块可以旋转的主屏了,电脑一直用着多屏,手机只有一块屏幕居然不太习惯,现在终于可以一边看QQ一边看B站了

这块6.8寸的主屏是1080P60的,很多人为既没有2K也没有高刷而感到遗憾,不知道为什么我对这个并没啥感觉,反而是被曲面屏的素质惊艳到了,可惜相机并不能拍出来
而且这块屏亮度也很高,在强烈的太阳光下清晰可读,晚上也没觉得OLED有多瞎眼 不过万一晚上没拿住掉下来能砸死倒是真的


这个屏幕尺寸也让机身长度来到了16.95cm,我的手掌根到中指尖刚好也差不多,再加上机身超过半斤,单手操作再也不可能了
副屏的下巴有点大,但其实真用起来也没啥影响
有待验证的一点是两块屏幕似乎有一定的色差,不过我只见过一次,然后就没观察到过这个现象,可能是由于调节亮度或者色温的时候系统没有同步,改成自动亮度之后就好了
屏幕问题的话可能不是屏幕本身的问题(什么绕口令),而是是屏幕的转轴,当然我也不清楚问题到底是设计问题导致本身就这样,还是因为不耐用转多了导致的,还是因为贩子拆机后装回去的水平不行导致的
转轴似乎有一些突起,导致转轴上下两侧不平,而且主屏和机身中间的缝比较大,如果不是端坐着的话可能因为重力作用屏幕离机身有一段距离,点屏幕的时候会按回去,轻微碰撞发出声音,在用输入法的时候尤其明显,关了声音和振动还有哒哒哒的声音 机械软键盘了属于是
相机没什么好说的,真要点拍什么我会拿相机,随手拍点记录生活的肯定够了
直男也用不着前摄,本来还用来人脸识别,换升降摄像头的手机之后连解锁都不用了,就彻底用不着前摄了,估计也就实名认证的时候用一下吧
只是我不太理解为啥要两个超广角而不是把其中一个换成长焦
刚好今天天上的积云挺漂亮的,就顺手拍两张

要是有空还能想起来的话出去再拍点
展开主屏之后的稳定器模式很有创意,可惜硬件上用的是一颗1300w的成像质量很差的超广角摄像头而不是真正的云台,即使在光照充足的条件下,果冻效应和满屏噪点也让画面变得非常不可用,使不错的软件设计无法发挥出来

2022.8.11update 出去玩顺手拍了点,应该能看出来哪些是主摄哪些是广角





这台机器为了旋转的主屏妥协了很多,比如上千美元的售价居然只用了765G,比如如此厚重的机身只有4000mAh的电池
但是作为一台2020年发布的旗舰机,除了处理器的遗憾之外该有的也都有了,玻璃后盖、无打孔的OLED曲面屏、屏幕指纹、无线充电、三摄和方向错了的4800w像素的主摄,甚至这个形态都能做到IP56的防尘防水
765G处理器性能不如855 865,在两块屏开不同应用的时候有的时候确实会卡。还好我已经多年不玩手游了,玩游戏都是用电脑,目前的性能还够用
4000mAh的电池加上两块屏确实不太耐用,亮屏时间也就四五个小时,对目前的我来说没什么问题,或许一年之后上大学就该考虑换了
买之前看过几篇评测文章和几个视频,都是把它当备用机甚至玩具来玩,但我还是决定还是作为主力机用,至少目前来说我还没有后悔
作为一台满是机械结构的手机,机身厚重我能接受,但是有点担心摄像头模组和转轴的寿命问题,尤其是这独特的转轴结构全球仅此一款,还是来自一个已经不做手机的厂商;玻璃后盖和两块屏容易在意外中受损,用的时候还是要小心一点
还有一点跟机器本身没啥关系,海鲜市场的水挺深的,我这台卖家说全原未拆机,实际成色完美得不像二手,一点磕碰划痕都没有,但是边框上似乎有补过漆,所以存疑,查了下没有被硬解过,就没再深究了;挑的时候甚至还看到声称是全新一手仅拆封的,我就更不敢买了
再用一段时间之后如果有新的体会就再来更新吧


有了想法之后,花五分钟买了个域名stydxm.com,花五分钟搭了个hexo,再花十分钟把博客放到了Cloudflare Pages上去,然后……花了好久好久挑了个主题Icarus和改域名的配置。总共花了不到一个小时把博客搭起来了,接下来就是把以前在各种地方写的一些东西搬到这里来(这也是有的文章时间比这篇还早的原因)
关于博客页面的更新也会写在这篇文章里
2022.7.26 把这篇文章的封面换成了必应的每日图片,API是ioliu的
]]>本文是我做的这期视频的文稿,删除服务器相关的内容之后放到博客上来了
北京时间2020.10.4,在Minecraft Live 2020上,MOJANG宣布了下一次更新的主题:洞穴与山崖。
2020.11.4,1.17的第一个快照20w45a发布;2021.6.8,1.17的第一个正式版发布;
2021.7.13,1.18的第一个快照1.18-experimental snapshot 1发布;2021.11.30,1.18的第一个正式版发布。
洞穴与山崖更新,地形生成改变之后,更高的高度上限,更漂亮的山峰、洞穴,美西螈、荧光鱿鱼,毫无疑问会带来全新的体验。
但是,对于一些开服已经很久的老服务器来说,1.18虽然是时代的潮流,服务器的升级却变得越来越困难。从低版本一点点升级的过程带来了沉重的历史包袱。毫无疑问,这些服务器必然会在将来的某一天更新到1.18,但是这其中有些事情,可能没那么容易。
最简单的方案当然是直接升级,已经探索过的区块下方会被拓展,新的地形要到更远的地方才能见到。这种方案对于存档是伤害最小也最方便的,但是效果却不佳:明明更新了,但新的内容要到几万格之外才能找到,相当于更新了寂寞。
类似的想法还有部分升级,比如把没什么问题的空岛、大厅升级,而生存不升级。对空岛来说,新地形没什么用,因为根本看不到,而对于生存区来说还是更新了寂寞。
另一个选择是开新区,现有的生存停留在1.16,新开一个1.18的生存区。这样确实是既保留了存档,又避开了老存档升级这个棘手的问题。但如果这样的话,会消耗大量服务器资源,而且如果开了新区,同是生存区,背包得要互通吧,那把新区的东西带到老区来怎么办呢?本来生存区人就不多,开了新区之后现有的生存区占用了大量资源,玩的人却更少了,也把生存区的玩家割裂开了
最后我觉得最好的方案就是删部分区块,这个其实早就有过设想,因为很多被探索过但没有改变过的区块并没有意义,但占了不少的储存空间,我们早就想找到一个办法删除这些区块,但似乎并没有非常精准的方案,最多也就是人工看一下,这样工作量极大而且靠人看很有可能会遗漏一些地方导致误删区块,因此可行性并不高
总之,更高的版本改变了地形生成机制,使我们这样一个坚持不换周目不删档的服务器升级过程遇到了很大的麻烦。我看到的其他服务器解决方案大多是删档换周目,这样的方式虽然最简单易行,还能从根本上解决问题,但与我们的理念(注:该服务器的理念是无周目)背道而驰,因此需要理念相似、愿意合作的服务器共同探索出解决方案。
但今天打开QQ空间,看到GIF的梗图,才意识到GIF仍然在被大量使用。
然后仔细一想,虽然GIF的分辨率低、帧率低、只有256色,虽然现在的web开发早已没有满屏闪烁的gif,没有雪碧图,虽然像谷歌苹果这样的巨头和各个开源组织都在不遗余力地推行更快或者更高压缩率的图形编码格式,比如webp和svg……但是,到现在除了gif,我们仍然没有第二种足够通行并且较轻量的动图格式,或许在将来较长时间里,也不会有。我们要么继续用gif,要么就只能用需要播放器的视频了。
2022.7.26 update
这篇文章原本发在B站动态和QQ空间里,今天搬到博客上的时候做了一点小修改,顺便查了一下除gif外现有的动态图片格式,然后发现了犯了个错误——Google的WebP其实是支持动图的,只是webp的动图有多少,恐怕不好说。
支持动图的格式:
APNG is an extension of the PNG format, adding support for animated images. It is intended to be a replacement for simple animated images that have traditionally used the GIF format, while adding support for 24-bit images and 8-bit transparency. APNG is a simpler alternative to MNG, providing a spec suitable for the most common usage of animated images on the Internet.
拓展自PNG,支持24bit位深度和8bit的透明图像
兼容PNG,第一帧为普通PNG,所以也可以作为普通PNG来解析
The 14-bit dynamics for image size limit the maximum size of a WebP lossless image to 16384✕16384 pixels.
官网上说支持最高14bit,16K分辨率的动态图片
基于AV1的图片格式,支持动图
支持多种色彩空间,多种压缩率,多种位深度
和APNG一样也拓展自PNG,而且得到了PNG的官方承认,但似乎目前兼容性还不如APNG
[1]: 封面图片:Computer programmer Stephen Wilhite accepts his Webby Lifetime Achievement Award in 2013. (Webby Awards/AP)
[2]: Stephen Wilhite, computer programmer who created the GIF, dies at 74
[3]: Graphics Interchange Format
本文原发布在QQ空间,博客搭好之后搬过来的
B站炸的原因,我觉得是技术问题或者内部问题,而不是网传的入侵或者停电着火。
炸的时候边缘CDN正常,因为我之前开的标签页还能看,而且还能缓存后面的内容。如果是被打的话,带宽够高(高到能打死几乎不可能),CDN会先被打死,但这次是源站出问题。就算真的是源站被打死了,而这次404和502都有,不像被打了。
关于停电着火,像这样规模的公司,至少在多地有多个数据中心,数据中心内部还有UPS和发电机。即使一个机房完全无法使用,把流量割接到别的机房也用不了多久。而且B站的会员购和游戏没问题,这两个业务和主站的视频业务是高度独立的,技术问题不会影响到这两个业务,所以技术问题的可能性更大一些。
至于各种叔叔**的,也就图一乐,不必当真。
2022.7.12 update
时隔近一年(比一年只少了一天)之后,B站官方的事故报告来了。
读完之后,和我一年之前想的差不多。原因确实是技术原因,而非外部攻击或者机房起火。
至于恢复方式嘛……重启下?诶不行。前段时间的更新回滚掉?诶还不行……要不重新搭一个……?
事故报告里写的根本原因在于弱类型语言里整型0和字符型"0"导致一个gcd函数死循环了。问题本身不大但导致了大问题。
]]>{kind=link}